 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom the Rock Floor to the Cloud: A Systematic Survey of State-of-the-Art NLP in Battery Life Cycle
Oct 31, 2025



We present a comprehensive systematic survey of the application of natural language processing (NLP) along the entire battery life cycle, instead of one stage or method, and introduce a novel technical language processing (TLP) framework for the EU's proposed digital battery passport (DBP) and other general battery predictions. We follow the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) method and employ three reputable databases or search engines, including Google Scholar, Institute of Electrical and Electronics Engineers Xplore (IEEE Xplore), and Scopus. Consequently, we assessed 274 scientific papers before the critical review of the final 66 relevant papers. We publicly provide artifacts of the review for validation and reproducibility. The findings show that new NLP tasks are emerging in the battery domain, which facilitate materials discovery and other stages of the life cycle. Notwithstanding, challenges remain, such as the lack of standard benchmarks. Our proposed TLP framework, which incorporates agentic AI and optimized prompts, will be apt for tackling some of the challenges.
Segmentation of Robot Movements using Position and Contact Forces
Sep 18, 2019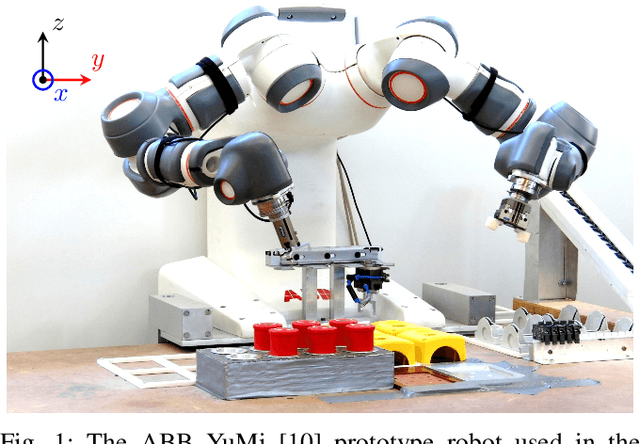
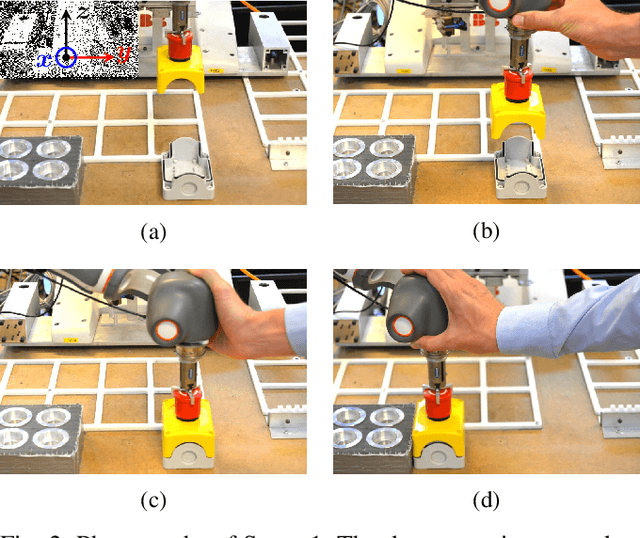
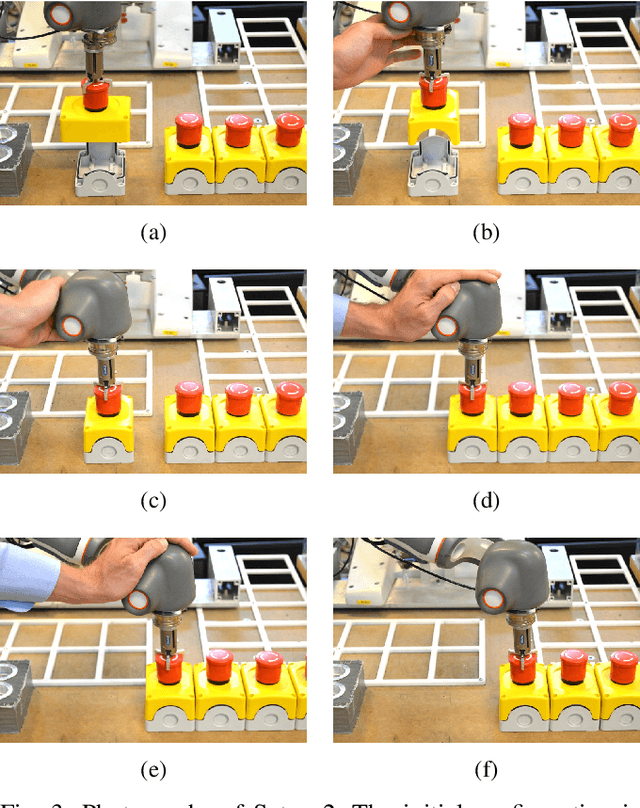
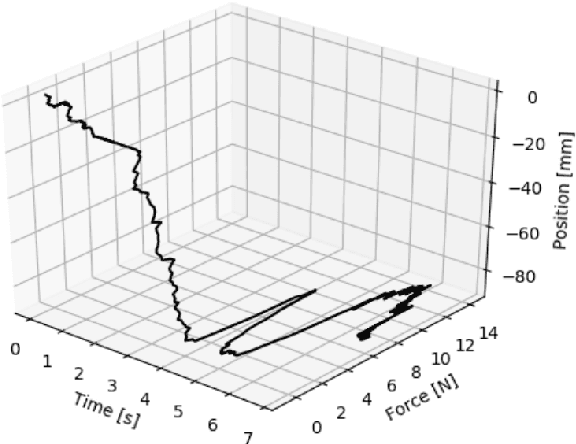
In this paper, a method for autonomous segmentation of demonstrated robot movements is proposed. Position data is clustered into Gaussian mixture models (GMMs), and an initial set of segments is identified from the Gaussian basis functions. A Kalman filter is used to detect sudden changes in the contact force/torque measurements, and this is used to update and verify the initial segmentation points. The segmentation method is verified experimentally on an industrial robot.
Temporally Coupled Dynamical Movement Primitives in Cartesian Space
May 27, 2019
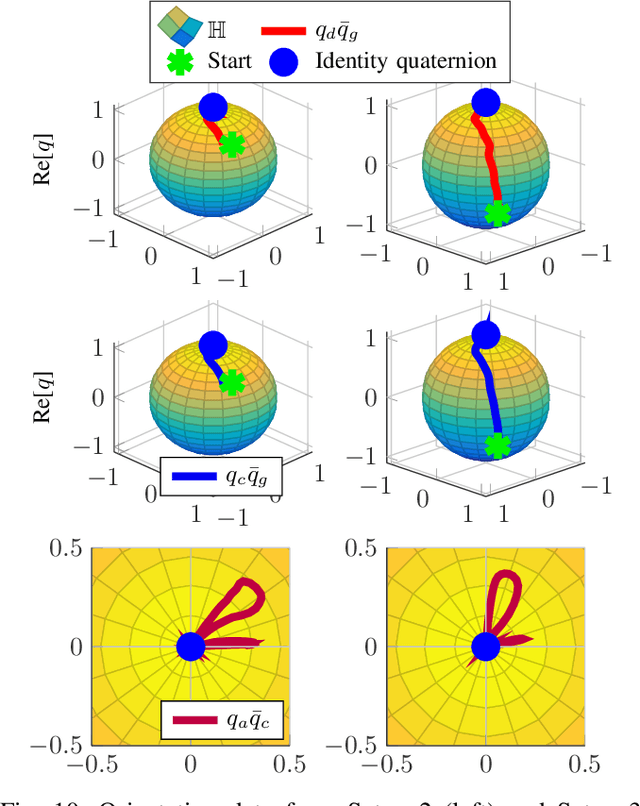
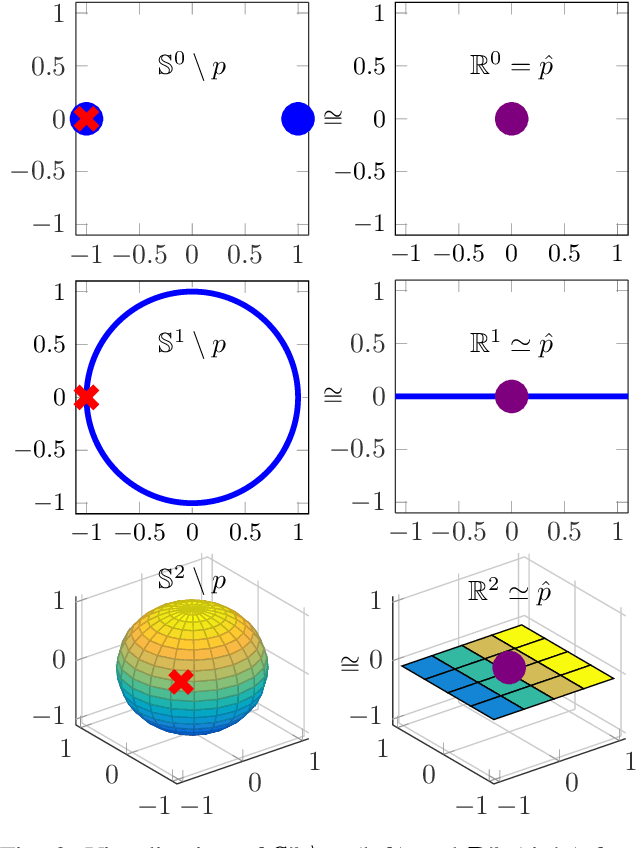
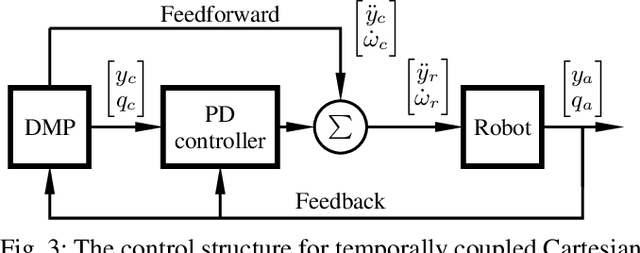
Control of robot orientation in Cartesian space implicates some difficulties, because the rotation group SO(3) is not contractible, and only globally contractible state spaces support continuous and globally asymptotically stable feedback control systems. In this paper, unit quaternions are used to represent orientations, and it is first shown that the unit quaternion set minus one single point is contractible. This is used to design a control system for temporally coupled dynamical movement primitives (DMPs) in Cartesian space. The functionality of the control system is verified experimentally on an industrial robot.
Autonomous Interpretation of Demonstrations for Modification of Dynamical Movement Primitives
May 27, 2019
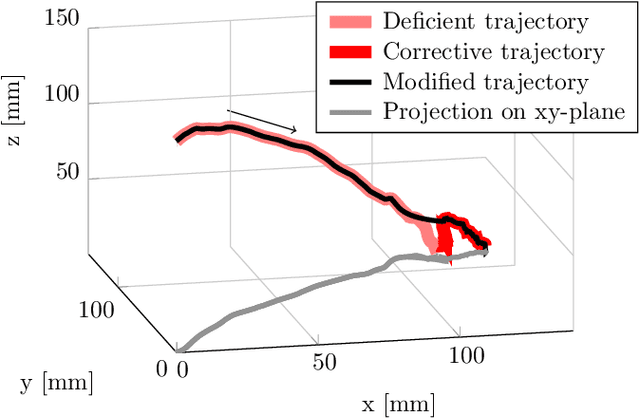
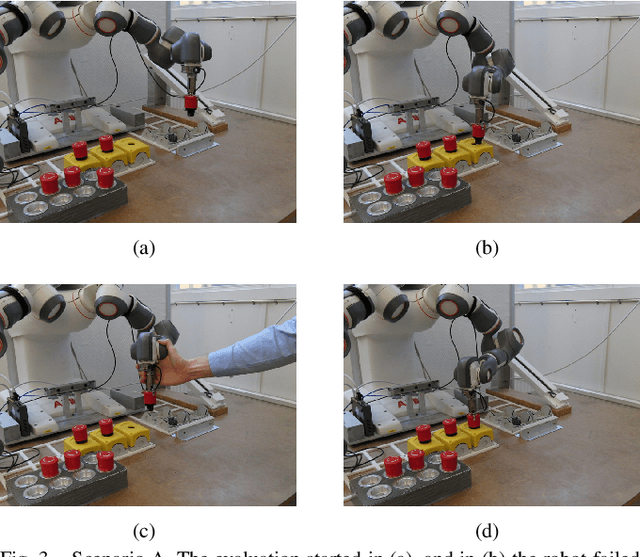
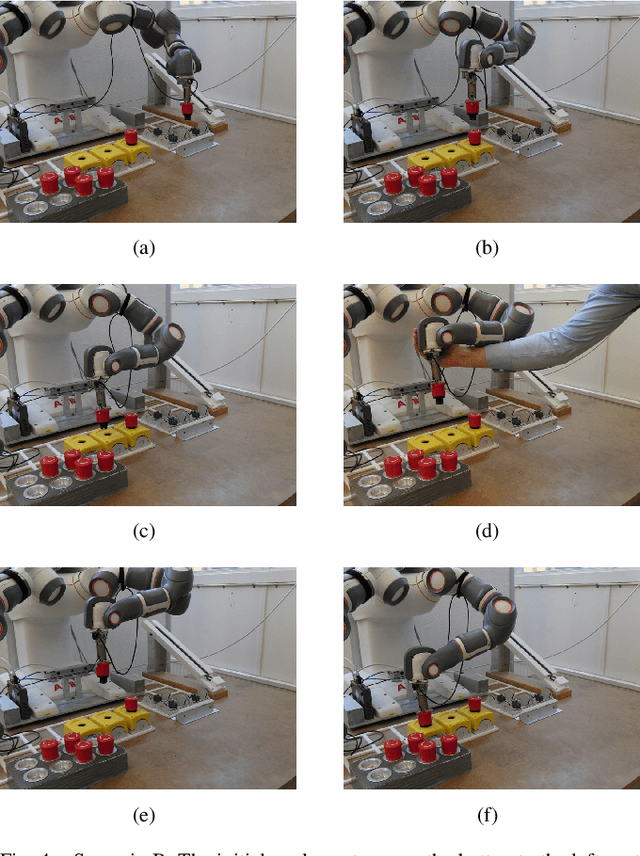
The concept of dynamical movement primitives (DMPs) has become popular for modeling of motion, commonly applied to robots. This paper presents a framework that allows a robot operator to adjust DMPs in an intuitive way. Given a generated trajectory with a faulty last part, the operator can use lead-through programming to demonstrate a corrective trajectory. A modified DMP is formed, based on the first part of the faulty trajectory and the last part of the corrective one. A real-time application is presented and verified experimentally.
On Motion Control and Machine Learning for Robotic Assembly
May 27, 2019


Industrial robots typically require very structured and predictable working environments, and explicit programming, in order to perform well. Therefore, expensive and time-consuming engineering work is a major obstruction when mediating tasks to robots. This thesis presents methods that decrease the amount of engineering work required for robot programming, and increase the ability of robots to handle unforeseen events. This has two main benefits: Firstly, the programming can be done faster, and secondly, it becomes accessible to users without engineering experience. Even though these methods could be used for various types of robot applications, this thesis is focused on robotic assembly tasks.