 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning Diffusion: Learning and Planning of Robot Motions with Diffusion Models
Aug 03, 2023Learning priors on trajectory distributions can help accelerate robot motion planning optimization. Given previously successful plans, learning trajectory generative models as priors for a new planning problem is highly desirable. Prior works propose several ways on utilizing this prior to bootstrapping the motion planning problem. Either sampling the prior for initializations or using the prior distribution in a maximum-a-posterior formulation for trajectory optimization. In this work, we propose learning diffusion models as priors. We then can sample directly from the posterior trajectory distribution conditioned on task goals, by leveraging the inverse denoising process of diffusion models. Furthermore, diffusion has been recently shown to effectively encode data multimodality in high-dimensional settings, which is particularly well-suited for large trajectory dataset. To demonstrate our method efficacy, we compare our proposed method - Motion Planning Diffusion - against several baselines in simulated planar robot and 7-dof robot arm manipulator environments. To assess the generalization capabilities of our method, we test it in environments with previously unseen obstacles. Our experiments show that diffusion models are strong priors to encode high-dimensional trajectory distributions of robot motions.
A Hierarchical Approach to Active Pose Estimation
Mar 08, 2022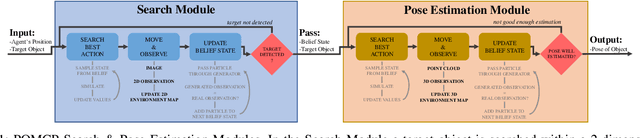
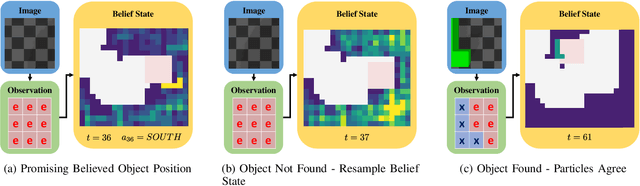
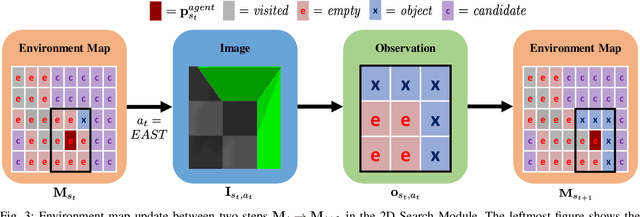
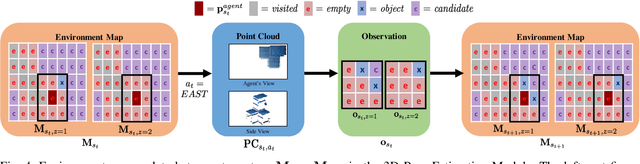
Creating mobile robots which are able to find and manipulate objects in large environments is an active topic of research. These robots not only need to be capable of searching for specific objects but also to estimate their poses often relying on environment observations, which is even more difficult in the presence of occlusions. Therefore, to tackle this problem we propose a simple hierarchical approach to estimate the pose of a desired object. An Active Visual Search module operating with RGB images first obtains a rough estimation of the object 2D pose, followed by a more computationally expensive Active Pose Estimation module using point cloud data. We empirically show that processing image features to obtain a richer observation speeds up the search and pose estimation computations, in comparison to a binary decision that indicates whether the object is or not in the current image.