 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompliant Control of Quadruped Robots for Assistive Load Carrying
Mar 13, 2025



This paper presents a novel method for assistive load carrying using quadruped robots. The controller uses proprioceptive sensor data to estimate external base wrench, that is used for precise control of the robot's acceleration during payload transport. The acceleration is controlled using a combination of admittance control and Control Barrier Function (CBF) based quadratic program (QP). The proposed controller rejects disturbances and maintains consistent performance under varying load conditions. Additionally, the built-in CBF guarantees collision avoidance with the collaborative agent in front of the robot. The efficacy of the overall controller is shown by its implementation on the physical hardware as well as numerical simulations. The proposed control framework aims to enhance the quadruped robot's ability to perform assistive tasks in various scenarios, from industrial applications to search and rescue operations.
Distributed Inverse Dynamics Control for Quadruped Robots using Geometric Optimization
Dec 13, 2024



This paper presents a distributed inverse dynamics controller (DIDC) for quadruped robots that addresses the limitations of existing reactive controllers: simplified dynamical models, the inability to handle exact friction cone constraints, and the high computational requirements of whole-body controllers. Current methods either ignore friction constraints entirely or use linear approximations, leading to potential slip and instability, while comprehensive whole-body controllers demand significant computational resources. Our approach uses full rigid-body dynamics and enforces exact friction cone constraints through a novel geometric optimization-based solver. DIDC combines the required generalized forces corresponding to the actuated and unactuated spaces by projecting them onto the actuated space while satisfying the physical constraints and maintaining orthogonality between the base and joint tracking objectives. Experimental validation shows that our approach reduces foot slippage, improves orientation tracking, and converges at least two times faster than existing reactive controllers with generic QP-based implementations. The controller enables stable omnidirectional trotting at various speeds and consumes less power than comparable methods while running efficiently on embedded processors.
Lightweight Multi-Drone Detection and 3D-Localization via YOLO
Feb 18, 2022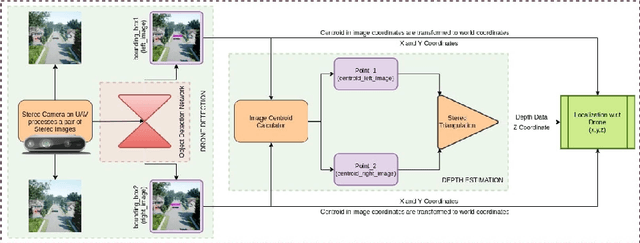
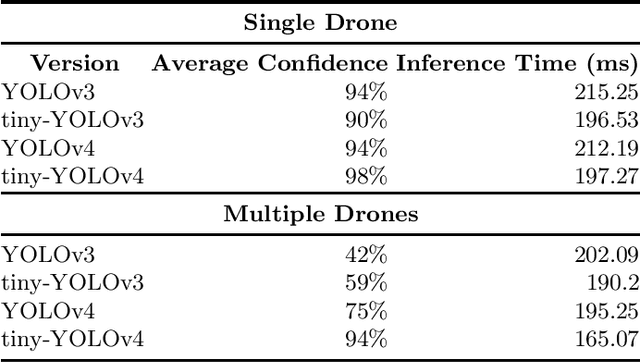
In this work, we present and evaluate a method to perform real-time multiple drone detection and three-dimensional localization using state-of-the-art tiny-YOLOv4 object detection algorithm and stereo triangulation. Our computer vision approach eliminates the need for computationally expensive stereo matching algorithms, thereby significantly reducing the memory footprint and making it deployable on embedded systems. Our drone detection system is highly modular (with support for various detection algorithms) and capable of identifying multiple drones in a system, with real-time detection accuracy of up to 77\% with an average FPS of 332 (on Nvidia Titan Xp). We also test the complete pipeline in AirSim environment, detecting drones at a maximum distance of 8 meters, with a mean error of $23\%$ of the distance. We also release the source code for the project, with pre-trained models and the curated synthetic stereo dataset.
Design and Development of Underwater Vehicle: ANAHITA
Mar 01, 2019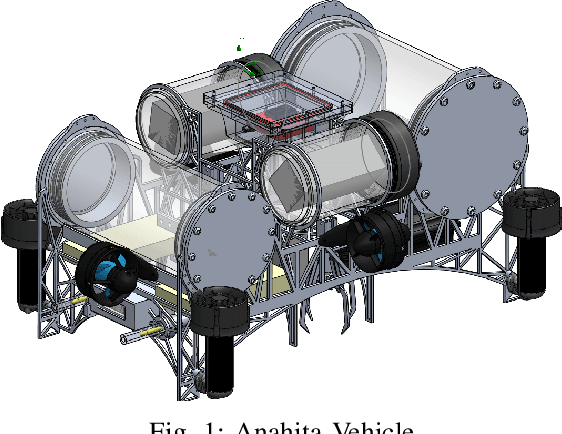
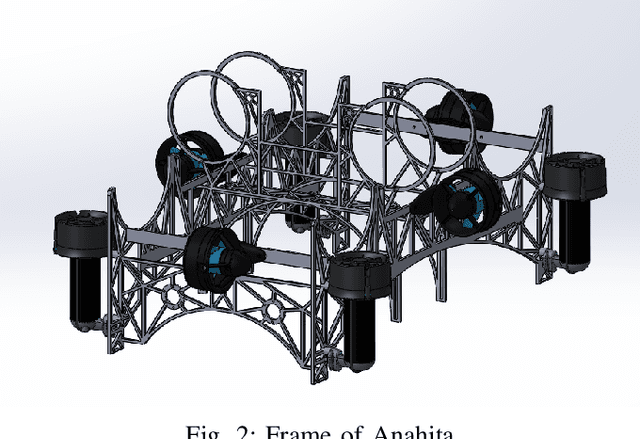
Anahita is an autonomous underwater vehicle which is currently being developed by interdisciplinary team of students at Indian Institute of Technology(IIT) Kanpur with aim to provide a platform for research in AUV to undergraduate students. This is the second vehicle which is being designed by AUV-IITK team to participate in 6th NIOT-SAVe competition organized by the National Institute of Ocean Technology, Chennai. The Vehicle has been completely redesigned with the major improvements in modularity and ease of access of all the components, keeping the design very compact and efficient. New advancements in the vehicle include, power distribution system and monitoring system. The sensors include the inertial measurement units (IMU), hydrophone array, a depth sensor, and two RGB cameras. The current vehicle features hot swappable battery pods giving a huge advantage over the previous vehicle, for longer runtime.