 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Physically Driven Long Short Term Memory Model for Estimating Snow Water Equivalent over the Continental United States
Apr 28, 2025



Snow is an essential input for various land surface models. Seasonal snow estimates are available as snow water equivalent (SWE) from process-based reanalysis products or locally from in situ measurements. While the reanalysis products are computationally expensive and available at only fixed spatial and temporal resolutions, the in situ measurements are highly localized and sparse. To address these issues and enable the analysis of the effect of a large suite of physical, morphological, and geological conditions on the presence and amount of snow, we build a Long Short-Term Memory (LSTM) network, which is able to estimate the SWE based on time series input of the various physical/meteorological factors as well static spatial/morphological factors. Specifically, this model breaks down the SWE estimation into two separate tasks: (i) a classification task that indicates the presence/absence of snow on a specific day and (ii) a regression task that indicates the height of the SWE on a specific day in the case of snow presence. The model is trained using physical/in situ SWE measurements from the SNOw TELemetry (SNOTEL) snow pillows in the western United States. We will show that trained LSTM models have a classification accuracy of $\geq 93\%$ for the presence of snow and a coefficient of correlation of $\sim 0.9$ concerning their SWE estimates. We will also demonstrate that the models can generalize both spatially and temporally to previously unseen data.
Automatic extraction of road intersection points from USGS historical map series using deep convolutional neural networks
Jul 14, 2020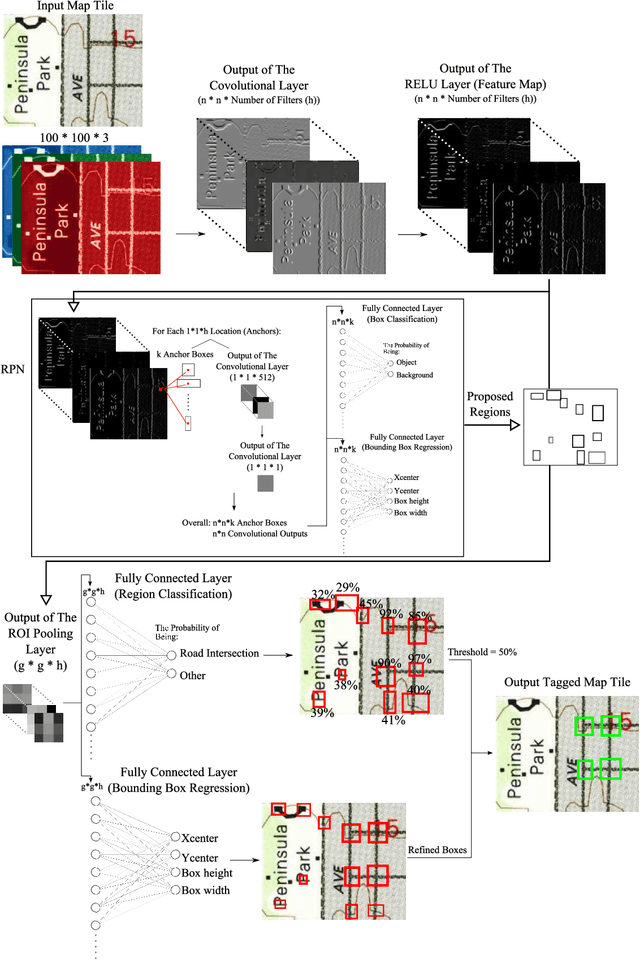
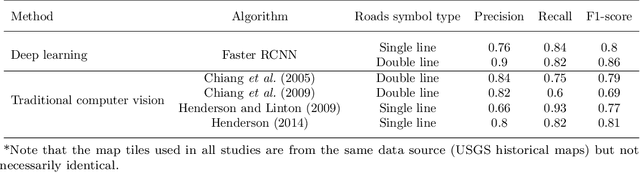
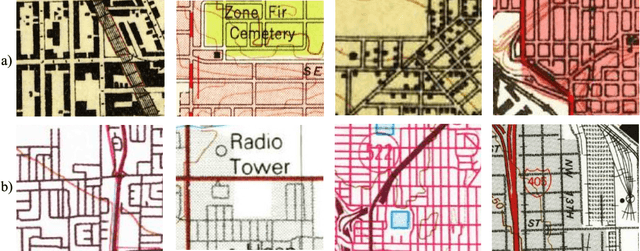
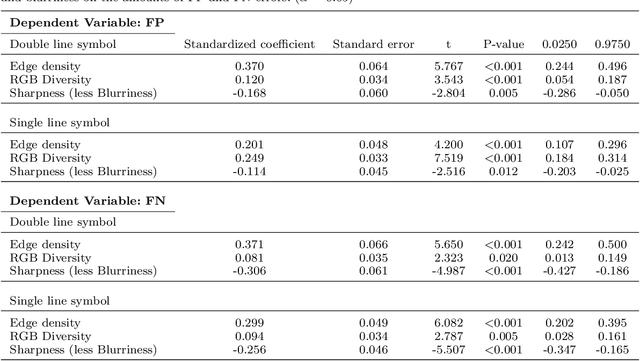
Road intersections data have been used across different geospatial applications and analysis. The road network datasets dating from pre-GIS years are only available in the form of historical printed maps. Before they can be analyzed by a GIS software, they need to be scanned and transformed into the usable vector-based format. Due to the great bulk of scanned historical maps, automated methods of transforming them into digital datasets need to be employed. Frequently, this process is based on computer vision algorithms. However, low conversion accuracy for low quality and visually complex maps and setting optimal parameters are the two challenges of using those algorithms. In this paper, we employed the standard paradigm of using deep convolutional neural network for object detection task named region-based CNN for automatically identifying road intersections in scanned historical USGS maps of several U.S. cities. We have found that the algorithm showed higher conversion accuracy for the double line cartographic representations of the road maps than the single line ones. Also, compared to the majority of traditional computer vision algorithms RCNN provides more accurate extraction. Finally, the results show that the amount of errors in the detection outputs is sensitive to complexity and blurriness of the maps as well as the number of distinct RGB combinations within them.
* 23 pages, 8 figures