 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Concept to Field Tests: Accelerated Development of Multi-AUV Missions Using a High-Fidelity Faster-than-Real-Time Simulator
Nov 17, 2023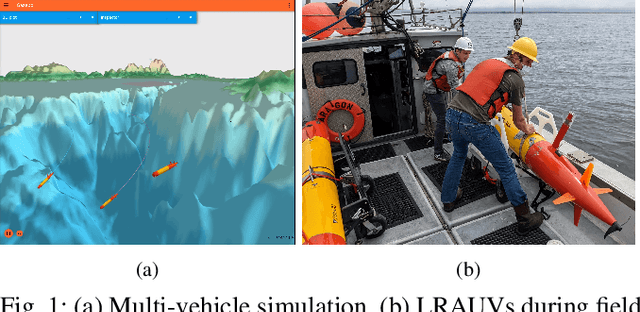
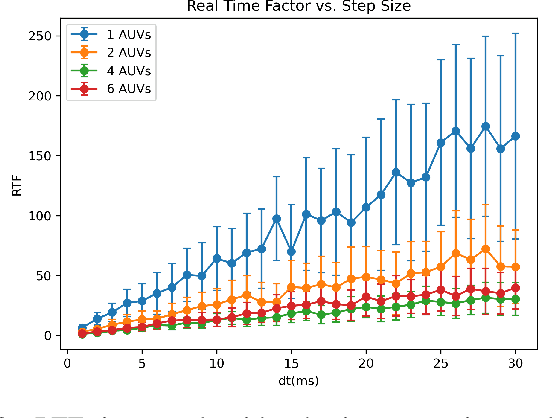
We designed and validated a novel simulator for efficient development of multi-robot marine missions. To accelerate development of cooperative behaviors, the simulator models the robots' operating conditions with moderately high fidelity and runs significantly faster than real time, including acoustic communications, dynamic environmental data, and high-resolution bathymetry in large worlds. The simulator's ability to exceed a real-time factor (RTF) of 100 has been stress-tested with a robust continuous integration suite and was used to develop a multi-robot field experiment.
DAVE Aquatic Virtual Environment: Toward a General Underwater Robotics Simulator
Sep 06, 2022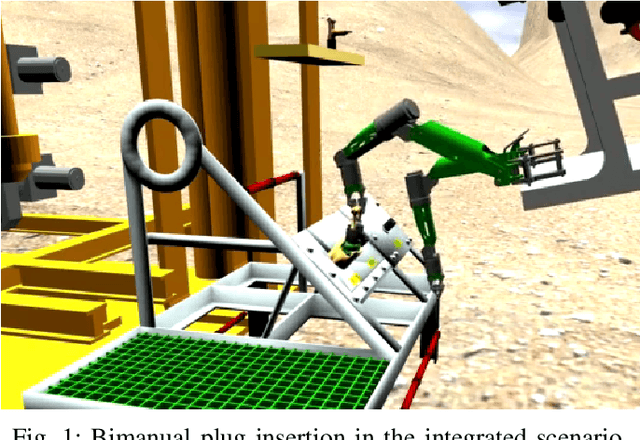
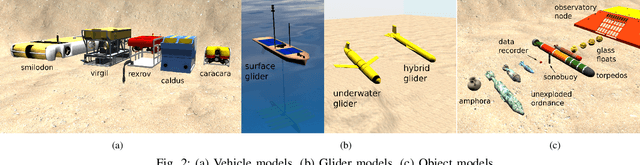
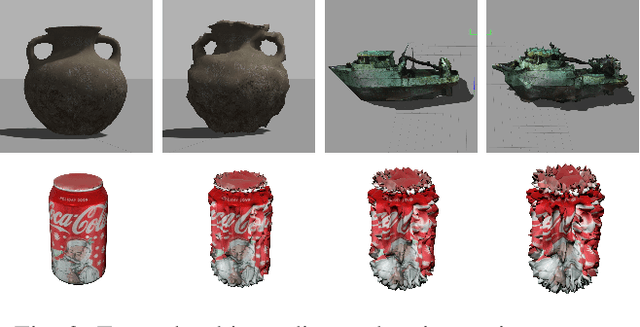
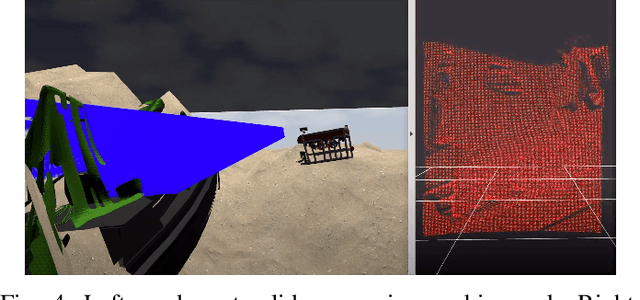
We present DAVE Aquatic Virtual Environment (DAVE), an open source simulation stack for underwater robots, sensors, and environments. Conventional robotics simulators are not designed to address unique challenges that come with the marine environment, including but not limited to environment conditions that vary spatially and temporally, impaired or challenging perception, and the unavailability of data in a generally unexplored environment. Given the variety of sensors and platforms, wheels are often reinvented for specific use cases that inevitably resist wider adoption. Building on existing simulators, we provide a framework to help speed up the development and evaluation of algorithms that would otherwise require expensive and time-consuming operations at sea. The framework includes basic building blocks (e.g., new vehicles, water-tracking Doppler Velocity Logger, physics-based multibeam sonar) as well as development tools (e.g., dynamic bathymetry spawning, ocean currents), which allows the user to focus on methodology rather than software infrastructure. We demonstrate usage through example scenarios, bathymetric data import, user interfaces for data inspection and motion planning for manipulation, and visualizations.
Active End-Effector Pose Selection for Tactile Object Recognition through Monte Carlo Tree Search
Jul 30, 2017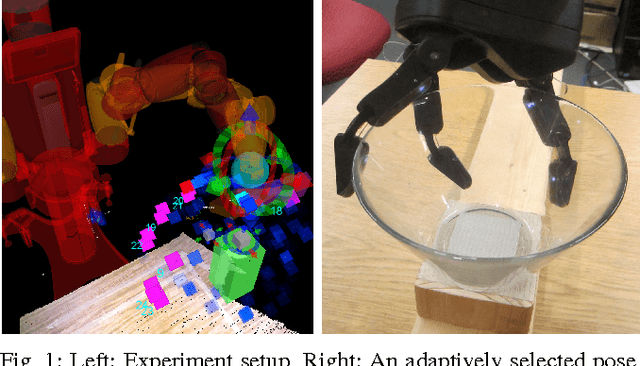
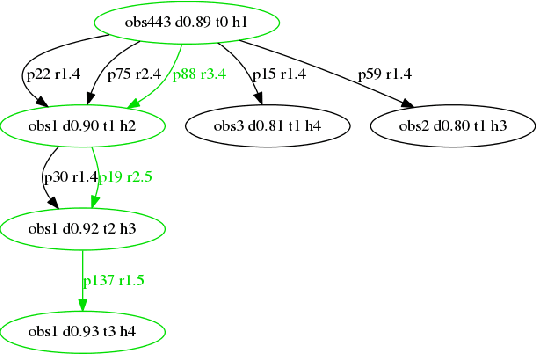
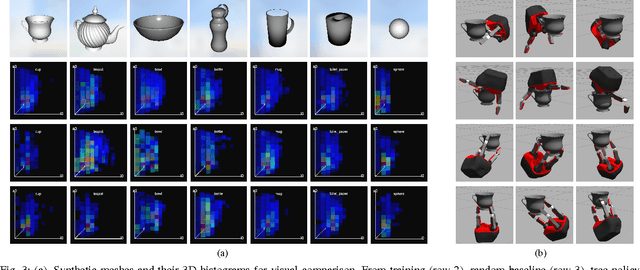
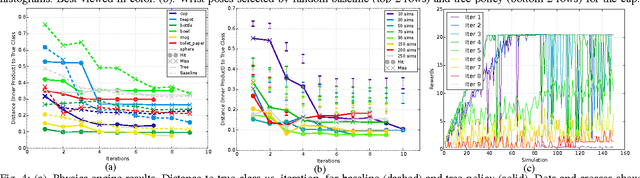
This paper considers the problem of active object recognition using touch only. The focus is on adaptively selecting a sequence of wrist poses that achieves accurate recognition by enclosure grasps. It seeks to minimize the number of touches and maximize recognition confidence. The actions are formulated as wrist poses relative to each other, making the algorithm independent of absolute workspace coordinates. The optimal sequence is approximated by Monte Carlo tree search. We demonstrate results in a physics engine and on a real robot. In the physics engine, most object instances were recognized in at most 16 grasps. On a real robot, our method recognized objects in 2--9 grasps and outperformed a greedy baseline.