 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-dimensional Sparse Parallelism for Large Scale Deep Learning Recommendation Model Training
Aug 05, 2025The increasing complexity of deep learning recommendation models (DLRM) has led to a growing need for large-scale distributed systems that can efficiently train vast amounts of data. In DLRM, the sparse embedding table is a crucial component for managing sparse categorical features. Typically, these tables in industrial DLRMs contain trillions of parameters, necessitating model parallelism strategies to address memory constraints. However, as training systems expand with massive GPUs, the traditional fully parallelism strategies for embedding table post significant scalability challenges, including imbalance and straggler issues, intensive lookup communication, and heavy embedding activation memory. To overcome these limitations, we propose a novel two-dimensional sparse parallelism approach. Rather than fully sharding tables across all GPUs, our solution introduces data parallelism on top of model parallelism. This enables efficient all-to-all communication and reduces peak memory consumption. Additionally, we have developed the momentum-scaled row-wise AdaGrad algorithm to mitigate performance losses associated with the shift in training paradigms. Our extensive experiments demonstrate that the proposed approach significantly enhances training efficiency while maintaining model performance parity. It achieves nearly linear training speed scaling up to 4K GPUs, setting a new state-of-the-art benchmark for recommendation model training.
Dynamic Knowledge embedding and tracing
May 18, 2020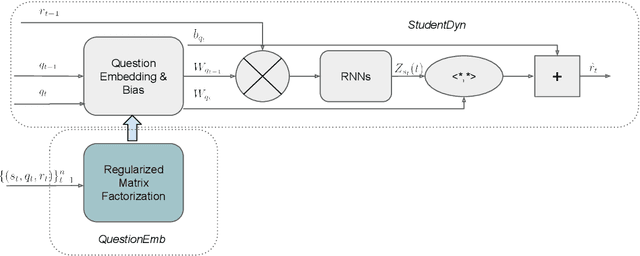
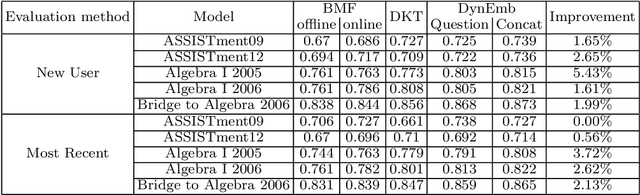
The goal of knowledge tracing is to track the state of a student's knowledge as it evolves over time. This plays a fundamental role in understanding the learning process and is a key task in the development of an intelligent tutoring system. In this paper we propose a novel approach to knowledge tracing that combines techniques from matrix factorization with recent progress in recurrent neural networks (RNNs) to effectively track the state of a student's knowledge. The proposed \emph{DynEmb} framework enables the tracking of student knowledge even without the concept/skill tag information that other knowledge tracing models require while simultaneously achieving superior performance. We provide experimental evaluations demonstrating that DynEmb achieves improved performance compared to baselines and illustrating the robustness and effectiveness of the proposed framework. We also evaluate our approach using several real-world datasets showing that the proposed model outperforms the previous state-of-the-art. These results suggest that combining embedding models with sequential models such as RNNs is a promising new direction for knowledge tracing.
Dynamic matrix recovery from incomplete observations under an exact low-rank constraint
Oct 28, 2016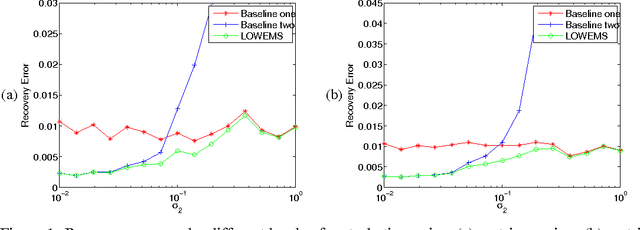
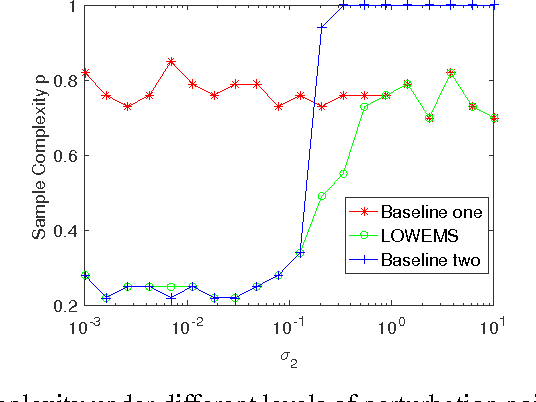
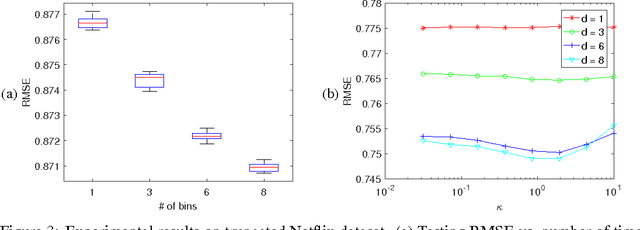
Low-rank matrix factorizations arise in a wide variety of applications -- including recommendation systems, topic models, and source separation, to name just a few. In these and many other applications, it has been widely noted that by incorporating temporal information and allowing for the possibility of time-varying models, significant improvements are possible in practice. However, despite the reported superior empirical performance of these dynamic models over their static counterparts, there is limited theoretical justification for introducing these more complex models. In this paper we aim to address this gap by studying the problem of recovering a dynamically evolving low-rank matrix from incomplete observations. First, we propose the locally weighted matrix smoothing (LOWEMS) framework as one possible approach to dynamic matrix recovery. We then establish error bounds for LOWEMS in both the {\em matrix sensing} and {\em matrix completion} observation models. Our results quantify the potential benefits of exploiting dynamic constraints both in terms of recovery accuracy and sample complexity. To illustrate these benefits we provide both synthetic and real-world experimental results.