 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeST-HOI: A Spatial-Temporal Baseline for Human-Object Interaction Detection in Videos
May 25, 2021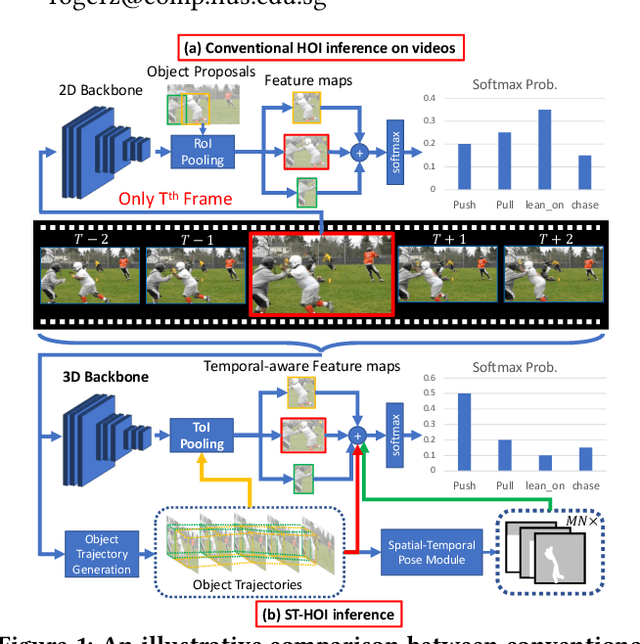

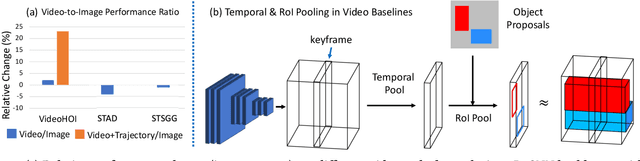
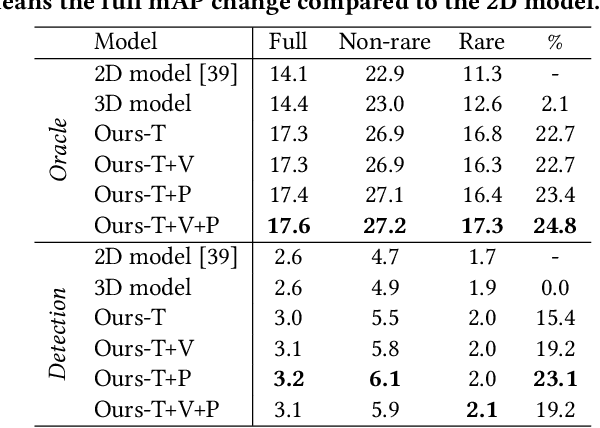
Detecting human-object interactions (HOI) is an important step toward a comprehensive visual understanding of machines. While detecting non-temporal HOIs (e.g., sitting on a chair) from static images is feasible, it is unlikely even for humans to guess temporal-related HOIs (e.g., opening/closing a door) from a single video frame, where the neighboring frames play an essential role. However, conventional HOI methods operating on only static images have been used to predict temporal-related interactions, which is essentially guessing without temporal contexts and may lead to sub-optimal performance. In this paper, we bridge this gap by detecting video-based HOIs with explicit temporal information. We first show that a naive temporal-aware variant of a common action detection baseline does not work on video-based HOIs due to a feature-inconsistency issue. We then propose a simple yet effective architecture named Spatial-Temporal HOI Detection (ST-HOI) utilizing temporal information such as human and object trajectories, correctly-localized visual features, and spatial-temporal masking pose features. We construct a new video HOI benchmark dubbed VidHOI where our proposed approach serves as a solid baseline.
eCNN: A Block-Based and Highly-Parallel CNN Accelerator for Edge Inference
Oct 13, 2019
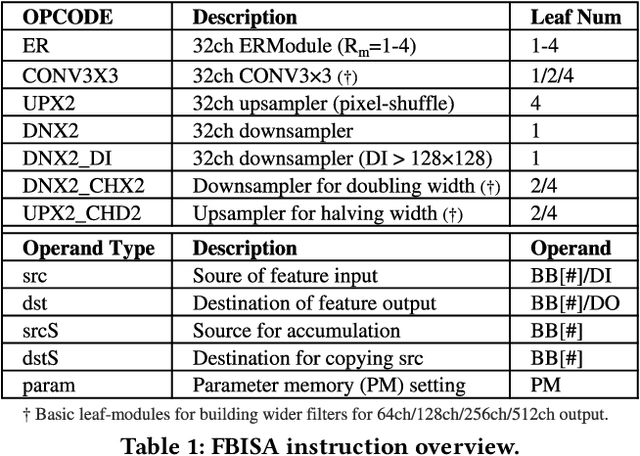
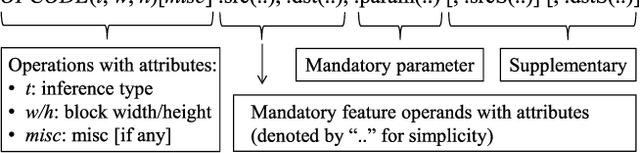
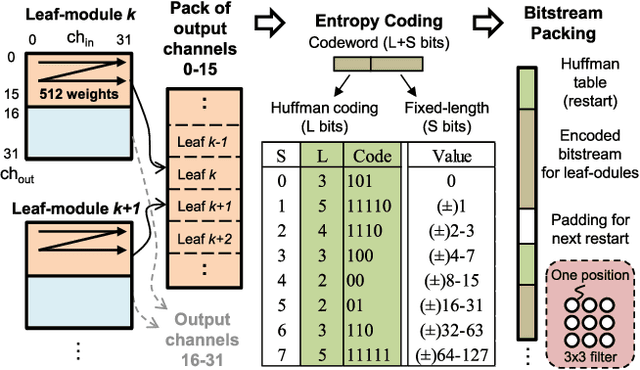
Convolutional neural networks (CNNs) have recently demonstrated superior quality for computational imaging applications. Therefore, they have great potential to revolutionize the image pipelines on cameras and displays. However, it is difficult for conventional CNN accelerators to support ultra-high-resolution videos at the edge due to their considerable DRAM bandwidth and power consumption. Therefore, finding a further memory- and computation-efficient microarchitecture is crucial to speed up this coming revolution. In this paper, we approach this goal by considering the inference flow, network model, instruction set, and processor design jointly to optimize hardware performance and image quality. We apply a block-based inference flow which can eliminate all the DRAM bandwidth for feature maps and accordingly propose a hardware-oriented network model, ERNet, to optimize image quality based on hardware constraints. Then we devise a coarse-grained instruction set architecture, FBISA, to support power-hungry convolution by massive parallelism. Finally,we implement an embedded processor---eCNN---which accommodates to ERNet and FBISA with a flexible processing architecture. Layout results show that it can support high-quality ERNets for super-resolution and denoising at up to 4K Ultra-HD 30 fps while using only DDR-400 and consuming 6.94W on average. By comparison, the state-of-the-art Diffy uses dual-channel DDR3-2133 and consumes 54.3W to support lower-quality VDSR at Full HD 30 fps. Lastly, we will also present application examples of high-performance style transfer and object recognition to demonstrate the flexibility of eCNN.