 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Systematic Comparison of Bayesian Deep Learning Robustness in Diabetic Retinopathy Tasks
Dec 22, 2019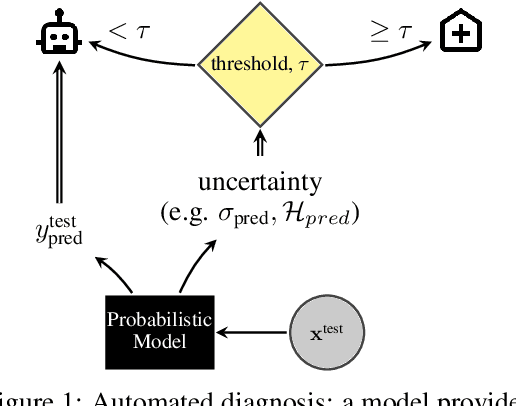
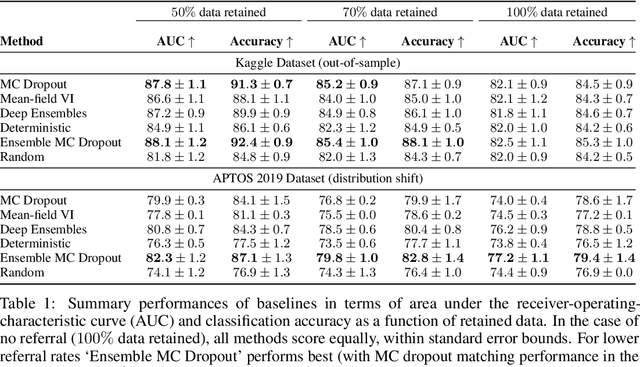
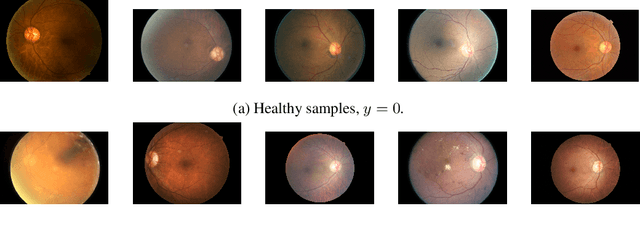
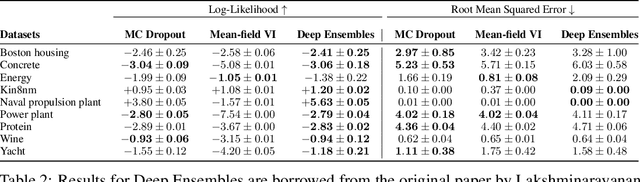
Evaluation of Bayesian deep learning (BDL) methods is challenging. We often seek to evaluate the methods' robustness and scalability, assessing whether new tools give `better' uncertainty estimates than old ones. These evaluations are paramount for practitioners when choosing BDL tools on-top of which they build their applications. Current popular evaluations of BDL methods, such as the UCI experiments, are lacking: Methods that excel with these experiments often fail when used in application such as medical or automotive, suggesting a pertinent need for new benchmarks in the field. We propose a new BDL benchmark with a diverse set of tasks, inspired by a real-world medical imaging application on \emph{diabetic retinopathy diagnosis}. Visual inputs (512x512 RGB images of retinas) are considered, where model uncertainty is used for medical pre-screening---i.e. to refer patients to an expert when model diagnosis is uncertain. Methods are then ranked according to metrics derived from expert-domain to reflect real-world use of model uncertainty in automated diagnosis. We develop multiple tasks that fall under this application, including out-of-distribution detection and robustness to distribution shift. We then perform a systematic comparison of well-tuned BDL techniques on the various tasks. From our comparison we conclude that some current techniques which solve benchmarks such as UCI `overfit' their uncertainty to the dataset---when evaluated on our benchmark these underperform in comparison to simpler baselines. The code for the benchmark, its baselines, and a simple API for evaluating new BDL tools are made available at https://github.com/oatml/bdl-benchmarks.
Flood Detection On Low Cost Orbital Hardware
Oct 14, 2019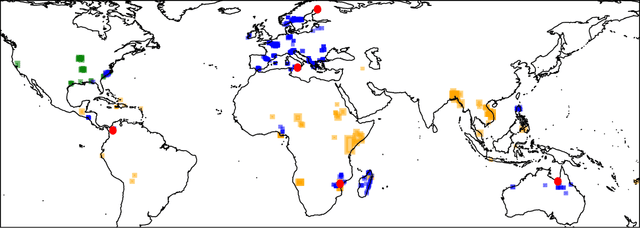

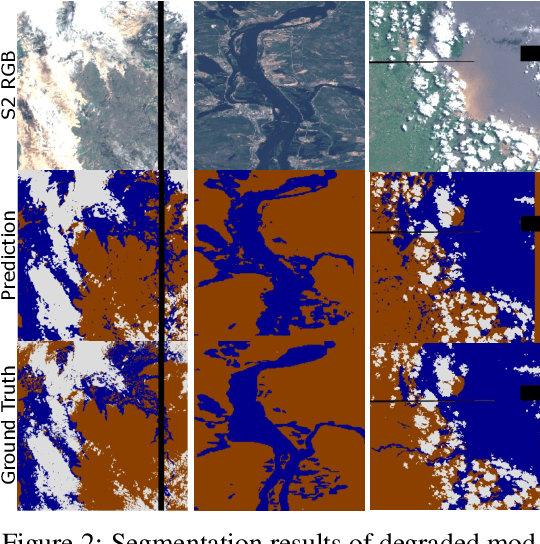
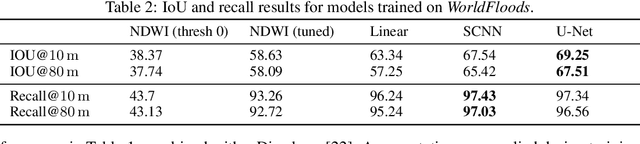
Satellite imaging is a critical technology for monitoring and responding to natural disasters such as flooding. Despite the capabilities of modern satellites, there is still much to be desired from the perspective of first response organisations like UNICEF. Two main challenges are rapid access to data, and the ability to automatically identify flooded regions in images. We describe a prototypical flood segmentation system, identifying cloud, water and land, that could be deployed on a constellation of small satellites, performing processing on board to reduce downlink bandwidth by 2 orders of magnitude. We target PhiSat-1, part of the FSSCAT mission, which is planned to be launched by the European Space Agency (ESA) near the start of 2020 as a proof of concept for this new technology.
Galaxy Zoo: Probabilistic Morphology through Bayesian CNNs and Active Learning
May 17, 2019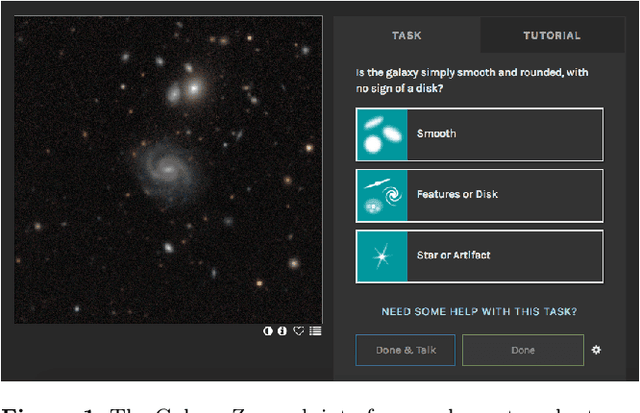
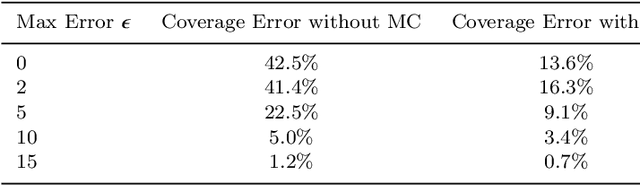
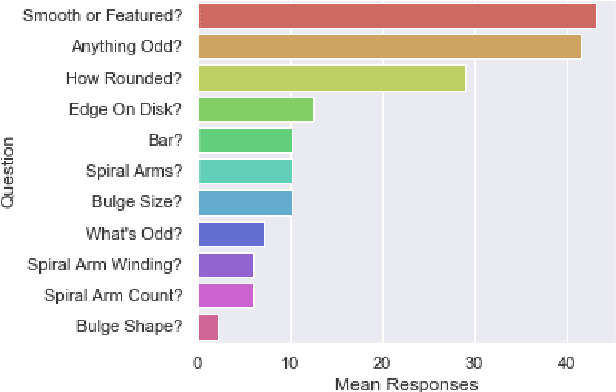
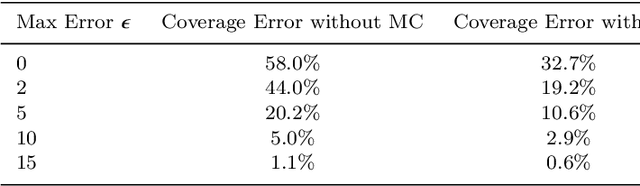
We use Bayesian convolutional neural networks and a novel generative model of Galaxy Zoo volunteer responses to infer posteriors for the visual morphology of galaxies. Bayesian CNN can learn from galaxy images with uncertain labels and then, for previously unlabelled galaxies, predict the probability of each possible label. Our posteriors are well-calibrated (e.g. for predicting bars, we achieve coverage errors of 10.6% within 5 responses and 2.9% within 10 responses) and hence are reliable for practical use. Further, using our posteriors, we apply the active learning strategy BALD to request volunteer responses for the subset of galaxies which, if labelled, would be most informative for training our network. We show that training our Bayesian CNNs using active learning requires up to 35-60% fewer labelled galaxies, depending on the morphological feature being classified. By combining human and machine intelligence, Galaxy Zoo will be able to classify surveys of any conceivable scale on a timescale of weeks, providing massive and detailed morphology catalogues to support research into galaxy evolution.
Sufficient Conditions for Idealised Models to Have No Adversarial Examples: a Theoretical and Empirical Study with Bayesian Neural Networks
Jun 28, 2018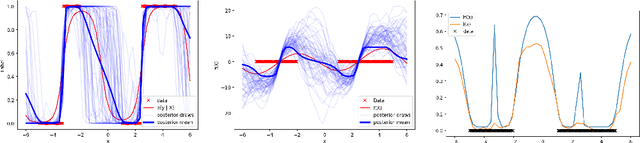
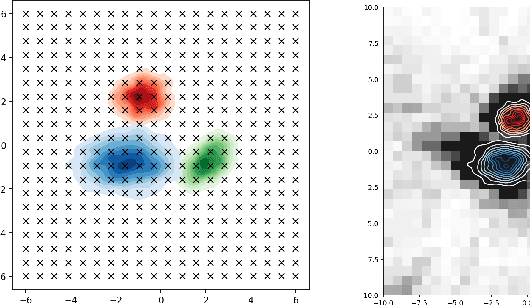
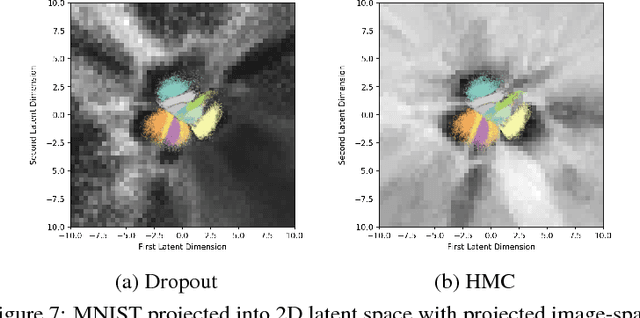
We prove, under two sufficient conditions, that idealised models can have no adversarial examples. We discuss which idealised models satisfy our conditions, and show that idealised Bayesian neural networks (BNNs) satisfy these. We continue by studying near-idealised BNNs using HMC inference, demonstrating the theoretical ideas in practice. We experiment with HMC on synthetic data derived from MNIST for which we know the ground-truth image density, showing that near-perfect epistemic uncertainty correlates to density under image manifold, and that adversarial images lie off the manifold in our setting. This suggests why MC dropout, which can be seen as performing approximate inference, has been observed to be an effective defence against adversarial examples in practice; We highlight failure-cases of non-idealised BNNs relying on dropout, suggesting a new attack for dropout models and a new defence as well. Lastly, we demonstrate the defence on a cats-vs-dogs image classification task with a VGG13 variant.
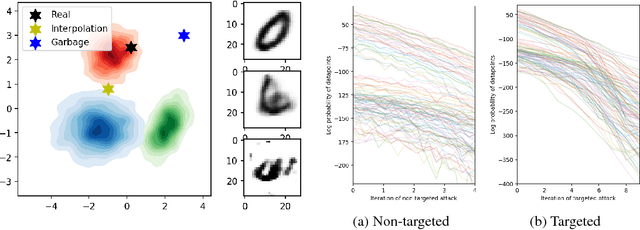
Understanding Measures of Uncertainty for Adversarial Example Detection
Mar 22, 2018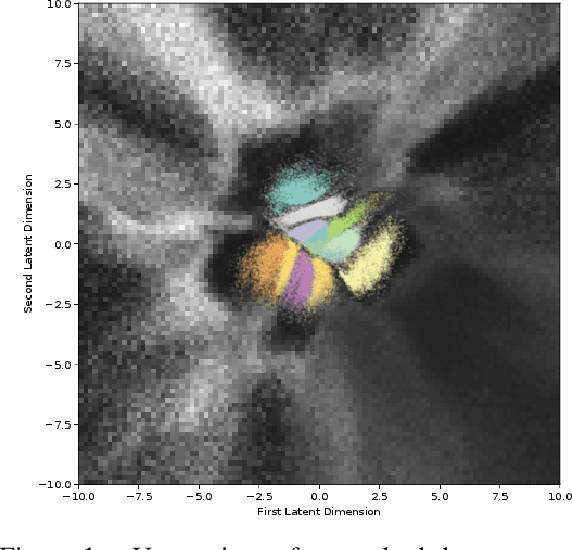
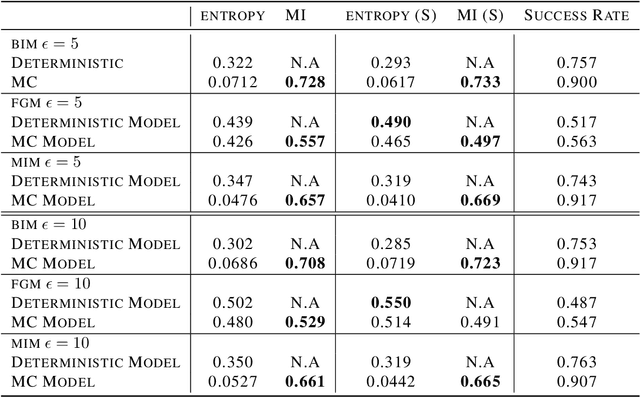
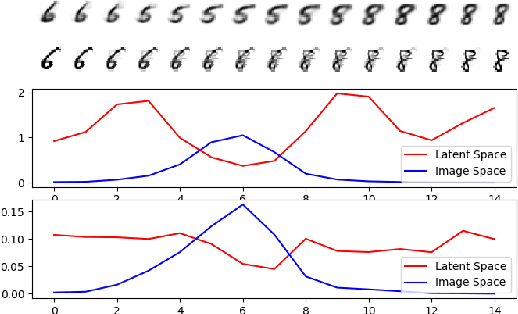
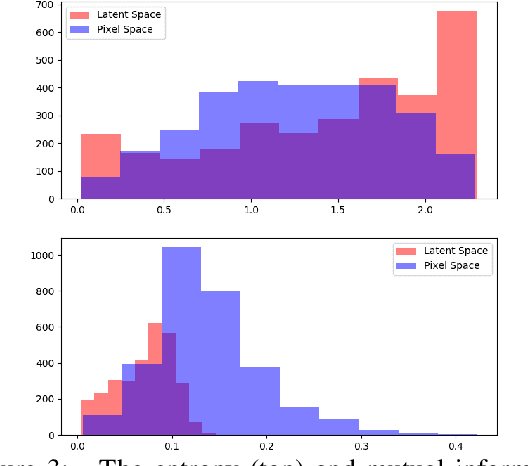
Measuring uncertainty is a promising technique for detecting adversarial examples, crafted inputs on which the model predicts an incorrect class with high confidence. But many measures of uncertainty exist, including predictive en- tropy and mutual information, each capturing different types of uncertainty. We study these measures, and shed light on why mutual information seems to be effective at the task of adversarial example detection. We highlight failure modes for MC dropout, a widely used approach for estimating uncertainty in deep models. This leads to an improved understanding of the drawbacks of current methods, and a proposal to improve the quality of uncertainty estimates using probabilistic model ensembles. We give illustrative experiments using MNIST to demonstrate the intuition underlying the different measures of uncertainty, as well as experiments on a real world Kaggle dogs vs cats classification dataset.