 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStage-wise Distortion-Perception Traversal in Zero-shot Inverse Problems with Diffusion Models
May 28, 2026The distortion-perception (D-P) tradeoff is a fundamental phenomenon of Bayesian inverse problems, which characterizes the inherent tension between distortion performance and perceptual quality. Enabling flexible traversal of the D-P tradeoff at inference time is crucial for practical applications. Despite the recent success of diffusion models in zero-shot inverse problem solving, efficient and principled strategies for D-P traversal in diffusion-based inverse algorithms remain inadequately characterized. In this paper, we propose a stage-wise framework for realizing D-P traversal using a single diffusion model in zero-shot inverse problems. Our proposed method, termed MAP-RPS, starts with an MAP estimation stage that approximates the MMSE solution and provides a low-distortion initialization, followed by a re-noised posterior sampling stage that progressively improves perceptual quality. We provide theoretical analyses for both stages, establishing the validity and effectiveness of the proposed design. Furthermore, we extend MAP-RPS to the latent space, yielding LMAP-RPS, which enjoys broader applicability by leveraging large-scale pre-trained latent diffusion backbones. Extensive experiments demonstrate that MAP-RPS and LMAP-RPS enable more effective D-P traversal on various tasks, while also exhibiting strong performance as efficient solvers for real-world inverse problems.
Improving Diffusion-based Inverse Algorithms under Few-Step Constraint via Learnable Linear Extrapolation
Mar 13, 2025



Diffusion models have demonstrated remarkable performance in modeling complex data priors, catalyzing their widespread adoption in solving various inverse problems. However, the inherently iterative nature of diffusion-based inverse algorithms often requires hundreds to thousands of steps, with performance degradation occurring under fewer steps which limits their practical applicability. While high-order diffusion ODE solvers have been extensively explored for efficient diffusion sampling without observations, their application to inverse problems remains underexplored due to the diverse forms of inverse algorithms and their need for repeated trajectory correction based on observations. To address this gap, we first introduce a canonical form that decomposes existing diffusion-based inverse algorithms into three modules to unify their analysis. Inspired by the linear subspace search strategy in the design of high-order diffusion ODE solvers, we propose the Learnable Linear Extrapolation (LLE) method, a lightweight approach that universally enhances the performance of any diffusion-based inverse algorithm that fits the proposed canonical form. Extensive experiments demonstrate consistent improvements of the proposed LLE method across multiple algorithms and tasks, indicating its potential for more efficient solutions and boosted performance of diffusion-based inverse algorithms with limited steps. Codes for reproducing our experiments are available at \href{https://github.com/weigerzan/LLE_inverse_problem}{https://github.com/weigerzan/LLE\_inverse\_problem}.
See it, Think it, Sorted: Large Multimodal Models are Few-shot Time Series Anomaly Analyzers
Nov 04, 2024



Time series anomaly detection (TSAD) is becoming increasingly vital due to the rapid growth of time series data across various sectors. Anomalies in web service data, for example, can signal critical incidents such as system failures or server malfunctions, necessitating timely detection and response. However, most existing TSAD methodologies rely heavily on manual feature engineering or require extensive labeled training data, while also offering limited interpretability. To address these challenges, we introduce a pioneering framework called the Time Series Anomaly Multimodal Analyzer (TAMA), which leverages the power of Large Multimodal Models (LMMs) to enhance both the detection and interpretation of anomalies in time series data. By converting time series into visual formats that LMMs can efficiently process, TAMA leverages few-shot in-context learning capabilities to reduce dependence on extensive labeled datasets. Our methodology is validated through rigorous experimentation on multiple real-world datasets, where TAMA consistently outperforms state-of-the-art methods in TSAD tasks. Additionally, TAMA provides rich, natural language-based semantic analysis, offering deeper insights into the nature of detected anomalies. Furthermore, we contribute one of the first open-source datasets that includes anomaly detection labels, anomaly type labels, and contextual description, facilitating broader exploration and advancement within this critical field. Ultimately, TAMA not only excels in anomaly detection but also provides a comprehensive approach for understanding the underlying causes of anomalies, pushing TSAD forward through innovative methodologies and insights.
MIMO ILC for Precision SEA robots using Input-weighted Complex-Kernel Regression
Oct 23, 2020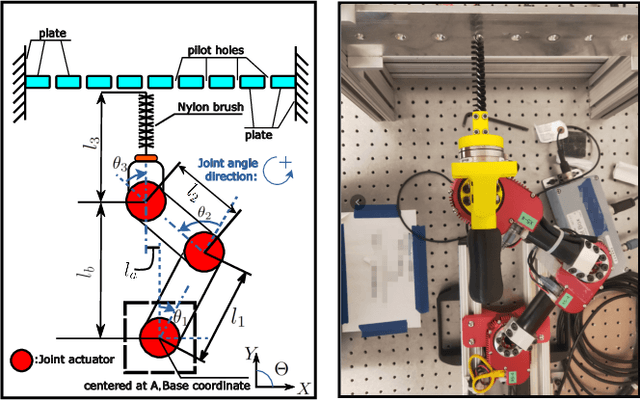
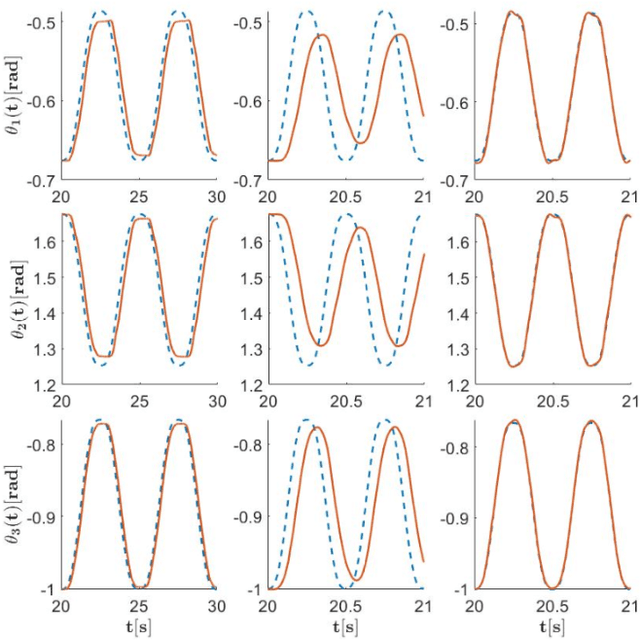
This work improves the positioning precision of lightweight robots with series elastic actuators (SEAs). Lightweight SEA robots, along with low-impedance control, can maneuver without causing damage in uncertain, confined spaces such as inside an aircraft wing during aircraft assembly. Nevertheless, substantial modeling uncertainties in SEA robots reduce the precision achieved by model-based approaches such as inversion-based feedforward. Therefore, this article improves the precision of SEA robots around specified operating points, through a multi-input multi-output (MIMO), iterative learning control (ILC) approach. The main contributions of this article are to (i) introduce an input-weighted complex kernel to estimate local MIMO models using complex Gaussian process regression (c-GPR) (ii) develop Ger\v{s}gorin-theorem-based conditions on the iteration gains for ensuring ILC convergence to precision within noise-related limits, even with errors in the estimated model; and (iii) demonstrate precision positioning with an experimental SEA robot. Comparative experimental results, with and without ILC, show around 90% improvement in the positioning precision (close to the repeatability limit of the robot) and a 10-times increase in the SEA robot's operating speed with the use of the MIMO ILC.