 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHAND Me the Data: Fast Robot Adaptation via Hand Path Retrieval
May 28, 2025



We hand the community HAND, a simple and time-efficient method for teaching robots new manipulation tasks through human hand demonstrations. Instead of relying on task-specific robot demonstrations collected via teleoperation, HAND uses easy-to-provide hand demonstrations to retrieve relevant behaviors from task-agnostic robot play data. Using a visual tracking pipeline, HAND extracts the motion of the human hand from the hand demonstration and retrieves robot sub-trajectories in two stages: first filtering by visual similarity, then retrieving trajectories with similar behaviors to the hand. Fine-tuning a policy on the retrieved data enables real-time learning of tasks in under four minutes, without requiring calibrated cameras or detailed hand pose estimation. Experiments also show that HAND outperforms retrieval baselines by over 2x in average task success rates on real robots. Videos can be found at our project website: https://liralab.usc.edu/handretrieval/.
Manta Ray Inspired Flapping-Wing Blimp
Oct 16, 2023Lighter-than-air vehicles or blimps, are an evolving platform in robotics with several beneficial properties such as energy efficiency, collision resistance, and ability to work in close proximity to human users. While existing blimp designs have mainly used propeller-based propulsion, we focus our attention to an alternate locomotion method, flapping wings. Specifically, this paper introduces a flapping-wing blimp inspired by manta rays, in contrast to existing research on flapping-wing vehicles that draw inspiration from insects or birds. We present the overall design and control scheme of the blimp as well as the analysis on how the wing performs. The effects of wing shape and flapping characteristics on the thrust generation are studied experimentally. We also demonstrate that the flapping-wing blimp has a significant range advantage over a propeller-based system.
Learning Fair Canonical Polyadical Decompositions using a Kernel Independence Criterion
Apr 27, 2021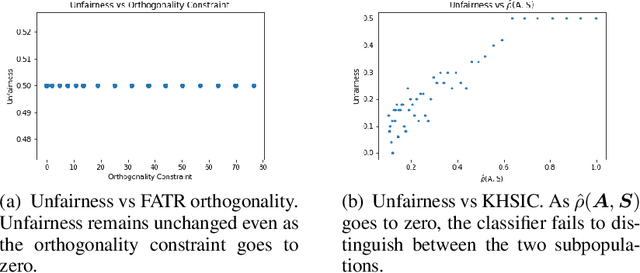
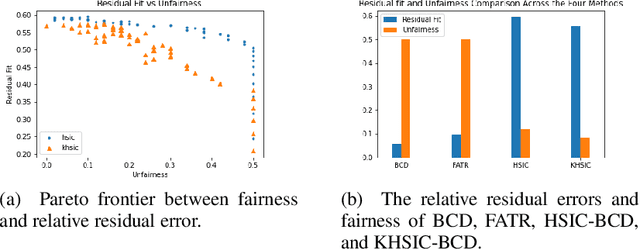

This work proposes to learn fair low-rank tensor decompositions by regularizing the Canonical Polyadic Decomposition factorization with the kernel Hilbert-Schmidt independence criterion (KHSIC). It is shown, theoretically and empirically, that a small KHSIC between a latent factor and the sensitive features guarantees approximate statistical parity. The proposed algorithm surpasses the state-of-the-art algorithm, FATR (Zhu et al., 2018), in controlling the trade-off between fairness and residual fit on synthetic and real data sets.