 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Limits of Layer Pruning for Generative Reasoning in LLMs
Feb 02, 2026Recent works have shown that layer pruning can compress large language models (LLMs) while retaining strong performance on classification benchmarks with little or no finetuning. However, existing pruning techniques often suffer severe degradation on generative reasoning tasks. Through a systematic study across multiple model families, we find that tasks requiring multi-step reasoning are particularly sensitive to depth reduction. Beyond surface-level text degeneration, we observe degradation of critical algorithmic capabilities, including arithmetic computation for mathematical reasoning and balanced parenthesis generation for code synthesis. Under realistic post-training constraints, without access to pretraining-scale data or compute, we evaluate a simple mitigation strategy based on supervised finetuning with Self-Generated Responses. This approach achieves strong recovery on classification tasks, retaining up to 90\% of baseline performance, and yields substantial gains of up to 20--30 percentage points on generative benchmarks compared to prior post-pruning techniques. Crucially, despite these gains, recovery for generative reasoning remains fundamentally limited relative to classification tasks and is viable primarily at lower pruning ratios. Overall, we characterize the practical limits of layer pruning for generative reasoning and provide guidance on when depth reduction can be applied effectively under constrained post-training regimes.
Training Reasoning Models on Saturated Problems via Failure-Prefix Conditioning
Jan 28, 2026Reinforcement Learning with Verifiable Rewards (RLVR) has substantially improved the reasoning abilities of large language models (LLMs), yet training often stalls as problems become saturated. We identify the core challenge as the poor accessibility of informative failures: learning signals exist but are rarely encountered during standard rollouts. To address this, we propose failure-prefix conditioning, a simple and effective method for learning from saturated problems. Rather than starting from the original question, our approach reallocates exploration by conditioning training on prefixes derived from rare incorrect reasoning trajectories, thereby exposing the model to failure-prone states. We observe that failure-prefix conditioning yields performance gains matching those of training on medium-difficulty problems, while preserving token efficiency. Furthermore, we analyze the model's robustness, finding that our method reduces performance degradation under misleading failure prefixes, albeit with a mild trade-off in adherence to correct early reasoning. Finally, we demonstrate that an iterative approach, which refreshes failure prefixes during training, unlocks additional gains after performance plateaus. Overall, our results suggest that failure-prefix conditioning offers an effective pathway to extend RLVR training on saturated problems.
Is Optimal Transport Necessary for Inverse Reinforcement Learning?
Jun 07, 2025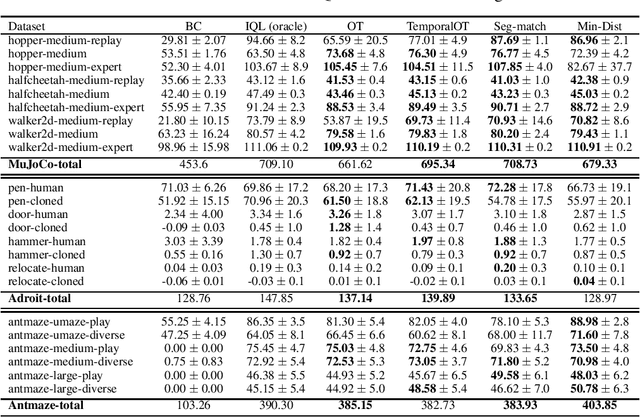
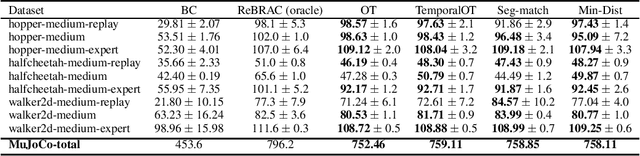
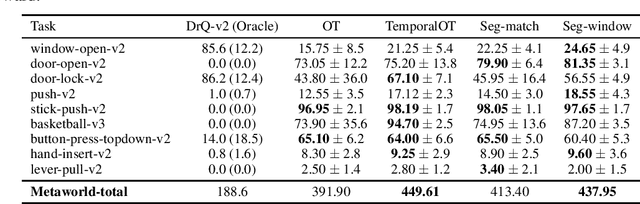
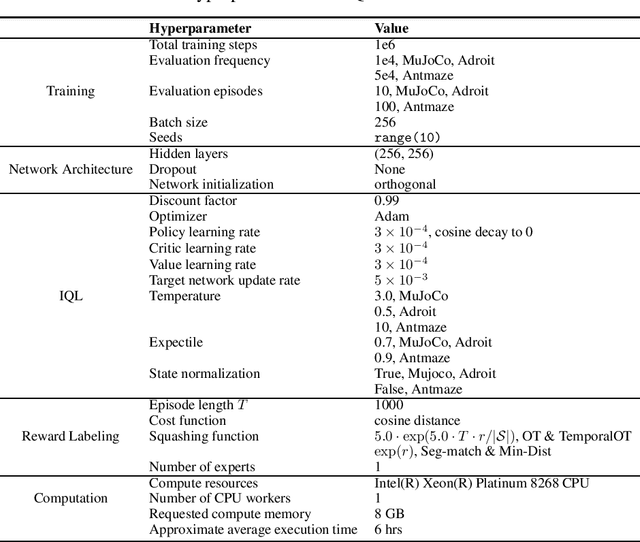
Inverse Reinforcement Learning (IRL) aims to recover a reward function from expert demonstrations. Recently, Optimal Transport (OT) methods have been successfully deployed to align trajectories and infer rewards. While OT-based methods have shown strong empirical results, they introduce algorithmic complexity, hyperparameter sensitivity, and require solving the OT optimization problems. In this work, we challenge the necessity of OT in IRL by proposing two simple, heuristic alternatives: (1) Minimum-Distance Reward, which assigns rewards based on the nearest expert state regardless of temporal order; and (2) Segment-Matching Reward, which incorporates lightweight temporal alignment by matching agent states to corresponding segments in the expert trajectory. These methods avoid optimization, exhibit linear-time complexity, and are easy to implement. Through extensive evaluations across 32 online and offline benchmarks with three reinforcement learning algorithms, we show that our simple rewards match or outperform recent OT-based approaches. Our findings suggest that the core benefits of OT may arise from basic proximity alignment rather than its optimal coupling formulation, advocating for reevaluation of complexity in future IRL design.
Reinforcement Learning vs. Distillation: Understanding Accuracy and Capability in LLM Reasoning
May 20, 2025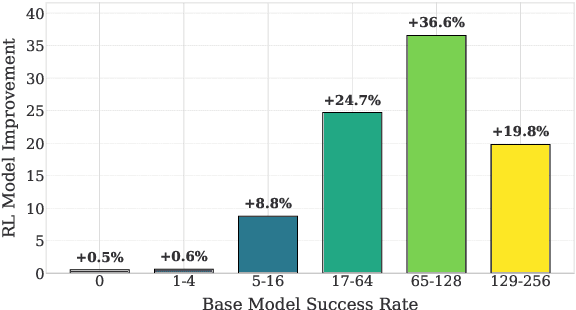
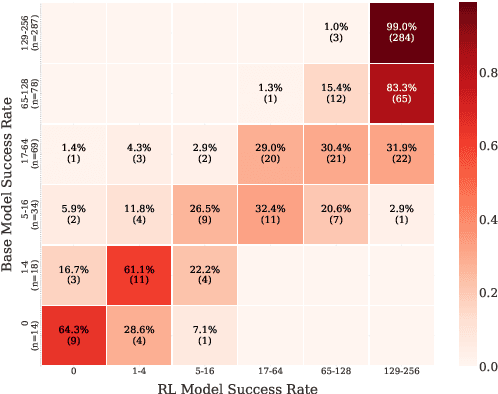
Recent studies have shown that reinforcement learning with verifiable rewards (RLVR) enhances overall accuracy but fails to improve capability, while distillation can improve both. In this paper, we investigate the mechanisms behind these phenomena. First, we demonstrate that RLVR does not improve capability because it focuses on improving the accuracy of the less-difficult questions to the detriment of the accuracy of the most difficult questions, thereby leading to no improvement in capability. Second, we find that RLVR does not merely increase the success probability for the less difficult questions, but in our small model settings produces quality responses that were absent in its output distribution before training. In addition, we show these responses are neither noticeably longer nor feature more reflection-related keywords, underscoring the need for more reliable indicators of response quality. Third, we show that while distillation reliably improves accuracy by learning strong reasoning patterns, it only improves capability when new knowledge is introduced. Moreover, when distilling only with reasoning patterns and no new knowledge, the accuracy of the less-difficult questions improves to the detriment of the most difficult questions, similar to RLVR. Together, these findings offer a clearer understanding of how RLVR and distillation shape reasoning behavior in language models.
Warm Up Before You Train: Unlocking General Reasoning in Resource-Constrained Settings
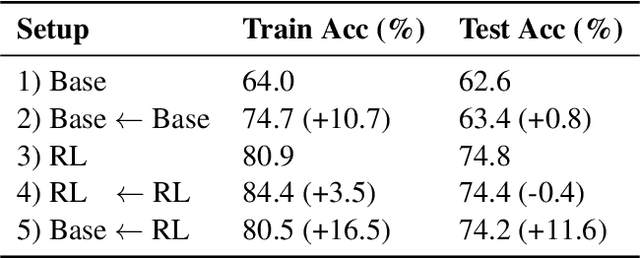
May 19, 2025Designing effective reasoning-capable LLMs typically requires training using Reinforcement Learning with Verifiable Rewards (RLVR) or distillation with carefully curated Long Chain of Thoughts (CoT), both of which depend heavily on extensive training data. This creates a major challenge when the amount of quality training data is scarce. We propose a sample-efficient, two-stage training strategy to develop reasoning LLMs under limited supervision. In the first stage, we "warm up" the model by distilling Long CoTs from a toy domain, namely, Knights \& Knaves (K\&K) logic puzzles to acquire general reasoning skills. In the second stage, we apply RLVR to the warmed-up model using a limited set of target-domain examples. Our experiments demonstrate that this two-phase approach offers several benefits: $(i)$ the warmup phase alone facilitates generalized reasoning, leading to performance improvements across a range of tasks, including MATH, HumanEval$^{+}$, and MMLU-Pro. $(ii)$ When both the base model and the warmed-up model are RLVR trained on the same small dataset ($\leq100$ examples), the warmed-up model consistently outperforms the base model; $(iii)$ Warming up before RLVR training allows a model to maintain cross-domain generalizability even after training on a specific domain; $(iv)$ Introducing warmup in the pipeline improves not only accuracy but also overall sample efficiency during RLVR training. The results in this paper highlight the promise of warmup for building robust reasoning LLMs in data-scarce environments.
Neural Multivariate Regression: Qualitative Insights from the Unconstrained Feature Model
May 14, 2025The Unconstrained Feature Model (UFM) is a mathematical framework that enables closed-form approximations for minimal training loss and related performance measures in deep neural networks (DNNs). This paper leverages the UFM to provide qualitative insights into neural multivariate regression, a critical task in imitation learning, robotics, and reinforcement learning. Specifically, we address two key questions: (1) How do multi-task models compare to multiple single-task models in terms of training performance? (2) Can whitening and normalizing regression targets improve training performance? The UFM theory predicts that multi-task models achieve strictly smaller training MSE than multiple single-task models when the same or stronger regularization is applied to the latter, and our empirical results confirm these findings. Regarding whitening and normalizing regression targets, the UFM theory predicts that they reduce training MSE when the average variance across the target dimensions is less than one, and our empirical results once again confirm these findings. These findings highlight the UFM as a powerful framework for deriving actionable insights into DNN design and data pre-processing strategies.
Mathematical Reasoning in Large Language Models: Assessing Logical and Arithmetic Errors across Wide Numerical Ranges
Feb 12, 2025Mathematical reasoning in Large Language Models (LLMs) is often evaluated using benchmarks with limited numerical ranges, failing to reflect real-world problem-solving across diverse scales. Furthermore, most existing evaluation methods only compare model outputs to ground-truth answers, obscuring insights into reasoning processes. To address these limitations, we introduce GSM-Ranges, a dataset generator derived from GSM8K that systematically perturbs numerical values in math problems to assess model robustness across varying numerical scales. Additionally, we propose a novel grading methodology that distinguishes between logical and non-logical errors, offering a more precise evaluation of reasoning processes beyond computational accuracy. Our experiments with various models reveal a significant increase in logical error rates-up to 14 percentage points-as numerical complexity rises, demonstrating a general weakness in reasoning with out-of-distribution numerical values. Moreover, while models demonstrate high accuracy on standalone arithmetic tasks, their performance deteriorates substantially when computations are embedded within word problems. These findings provide a comprehensive evaluation of LLMs' mathematical reasoning capabilities and inform future research directions for improving numerical generalization in language models.
Finite-Sample Analysis of the Monte Carlo Exploring Starts Algorithm for Reinforcement Learning
Oct 03, 2024Monte Carlo Exploring Starts (MCES), which aims to learn the optimal policy using only sample returns, is a simple and natural algorithm in reinforcement learning which has been shown to converge under various conditions. However, the convergence rate analysis for MCES-style algorithms in the form of sample complexity has received very little attention. In this paper we develop a finite sample bound for a modified MCES algorithm which solves the stochastic shortest path problem. To this end, we prove a novel result on the convergence rate of the policy iteration algorithm. This result implies that with probability at least $1-\delta$, the algorithm returns an optimal policy after $\tilde{O}(SAK^3\log^3\frac{1}{\delta})$ sampled episodes, where $S$ and $A$ denote the number of states and actions respectively, $K$ is a proxy for episode length, and $\tilde{O}$ hides logarithmic factors and constants depending on the rewards of the environment that are assumed to be known.
The Prevalence of Neural Collapse in Neural Multivariate Regression
Sep 06, 2024



Recently it has been observed that neural networks exhibit Neural Collapse (NC) during the final stage of training for the classification problem. We empirically show that multivariate regression, as employed in imitation learning and other applications, exhibits Neural Regression Collapse (NRC), a new form of neural collapse: (NRC1) The last-layer feature vectors collapse to the subspace spanned by the $n$ principal components of the feature vectors, where $n$ is the dimension of the targets (for univariate regression, $n=1$); (NRC2) The last-layer feature vectors also collapse to the subspace spanned by the last-layer weight vectors; (NRC3) The Gram matrix for the weight vectors converges to a specific functional form that depends on the covariance matrix of the targets. After empirically establishing the prevalence of (NRC1)-(NRC3) for a variety of datasets and network architectures, we provide an explanation of these phenomena by modeling the regression task in the context of the Unconstrained Feature Model (UFM), in which the last layer feature vectors are treated as free variables when minimizing the loss function. We show that when the regularization parameters in the UFM model are strictly positive, then (NRC1)-(NRC3) also emerge as solutions in the UFM optimization problem. We also show that if the regularization parameters are equal to zero, then there is no collapse. To our knowledge, this is the first empirical and theoretical study of neural collapse in the context of regression. This extension is significant not only because it broadens the applicability of neural collapse to a new category of problems but also because it suggests that the phenomena of neural collapse could be a universal behavior in deep learning.
Cross Entropy versus Label Smoothing: A Neural Collapse Perspective
Feb 07, 2024Label smoothing loss is a widely adopted technique to mitigate overfitting in deep neural networks. This paper studies label smoothing from the perspective of Neural Collapse (NC), a powerful empirical and theoretical framework which characterizes model behavior during the terminal phase of training. We first show empirically that models trained with label smoothing converge faster to neural collapse solutions and attain a stronger level of neural collapse. Additionally, we show that at the same level of NC1, models under label smoothing loss exhibit intensified NC2. These findings provide valuable insights into the performance benefits and enhanced model calibration under label smoothing loss. We then leverage the unconstrained feature model to derive closed-form solutions for the global minimizers for both loss functions and further demonstrate that models under label smoothing have a lower conditioning number and, therefore, theoretically converge faster. Our study, combining empirical evidence and theoretical results, not only provides nuanced insights into the differences between label smoothing and cross-entropy losses, but also serves as an example of how the powerful neural collapse framework can be used to improve our understanding of DNNs.