 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent AI Framework for Road Situation Detection and C-ITS Message Generation
Nov 10, 2025


Conventional road-situation detection methods achieve strong performance in predefined scenarios but fail in unseen cases and lack semantic interpretation, which is crucial for reliable traffic recommendations. This work introduces a multi-agent AI framework that combines multimodal large language models (MLLMs) with vision-based perception for road-situation monitoring. The framework processes camera feeds and coordinates dedicated agents for situation detection, distance estimation, decision-making, and Cooperative Intelligent Transport System (C-ITS) message generation. Evaluation is conducted on a custom dataset of 103 images extracted from 20 videos of the TAD dataset. Both Gemini-2.0-Flash and Gemini-2.5-Flash were evaluated. The results show 100\% recall in situation detection and perfect message schema correctness; however, both models suffer from false-positive detections and have reduced performance in terms of number of lanes, driving lane status and cause code. Surprisingly, Gemini-2.5-Flash, though more capable in general tasks, underperforms Gemini-2.0-Flash in detection accuracy and semantic understanding and incurs higher latency (Table II). These findings motivate further work on fine-tuning specialized LLMs or MLLMs tailored for intelligent transportation applications.
Safety Metric Aware Trajectory Repairing for Automated Driving
Aug 20, 2024



Recent analyses highlight challenges in autonomous vehicle technologies, particularly failures in decision-making under dynamic or emergency conditions. Traditional automated driving systems recalculate the entire trajectory in a changing environment. Instead, a novel approach retains valid trajectory segments, minimizing the need for complete replanning and reducing changes to the original plan. This work introduces a trajectory repairing framework that calculates a feasible evasive trajectory while computing the Feasible Time-to-React (F-TTR), balancing the maintenance of the original plan with safety assurance. The framework employs a binary search algorithm to iteratively create repaired trajectories, guaranteeing both the safety and feasibility of the trajectory repairing result. In contrast to earlier approaches that separated the calculation of safety metrics from trajectory repairing, which resulted in unsuccessful plans for evasive maneuvers, our work has the anytime capability to provide both a Feasible Time-to-React and an evasive trajectory for further execution.
Overview of Tools Supporting Planning for Automated Driving
Mar 09, 2020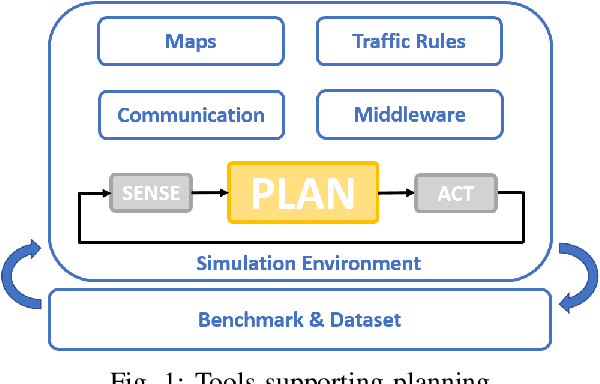
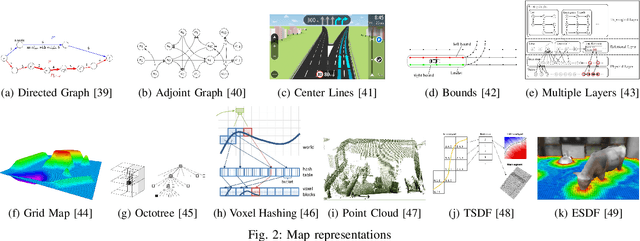
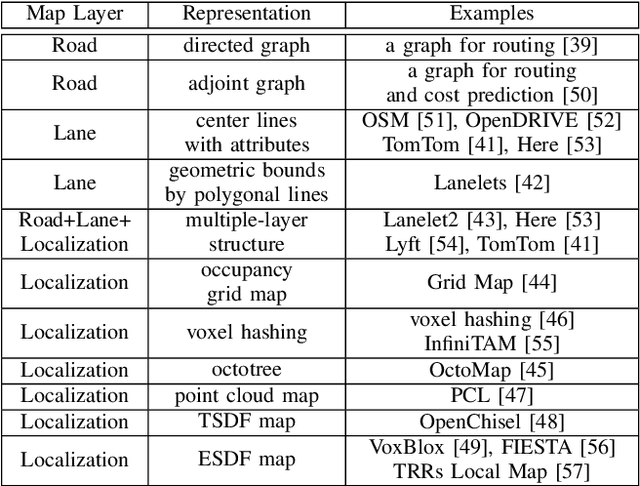
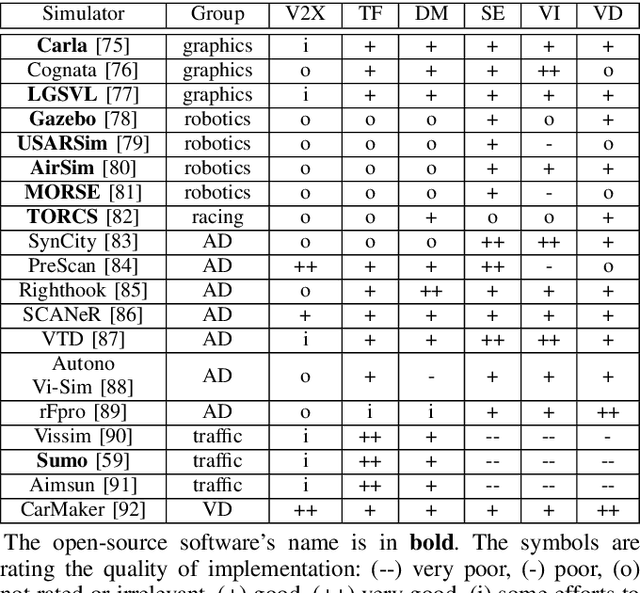
Planning is an essential topic in the realm of automated driving. Besides planning algorithms that are widely covered in the literature, planning requires different software tools for its development, validation, and execution. This paper presents a survey of such tools including map representations, communication, traffic rules, open-source planning stacks and middleware, simulation, and visualization tools as well as benchmarks. We start by defining the planning task and different supporting tools. Next, we provide a comprehensive review of state-of-the-art developments and analysis of relations among them. Finally, we discuss the current gaps and suggest future research directions.