 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable SpaTiaL: Symbolic Learning and Reasoning with Geometric Temporal Logic for Manipulation Tasks
Apr 03, 2026Executing complex manipulation in cluttered environments requires satisfying coupled geometric and temporal constraints. Although Spatio-Temporal Logic (SpaTiaL) offers a principled specification framework, its use in gradient-based optimization is limited by non-differentiable geometric operations. Existing differentiable temporal logics focus on the robot's internal state and neglect interactive object-environment relations, while spatial logic approaches that capture such interactions rely on discrete geometry engines that break the computational graph and preclude exact gradient propagation. To overcome this limitation, we propose Differentiable SpaTiaL, a fully tensorized toolbox that constructs smooth, autograd-compatible geometric primitives directly over polygonal sets. To the best of our knowledge, this is the first end-to-end differentiable symbolic spatio-temporal logic toolbox. By analytically deriving differentiable relaxations of key spatial predicates--including signed distance, intersection, containment, and directional relations--we enable an end-to-end differentiable mapping from high-level semantic specifications to low-level geometric configurations, without invoking external discrete solvers. This fully differentiable formulation unlocks two core capabilities: (i) massively parallel trajectory optimization under rigorous spatio-temporal constraints, and (ii) direct learning of spatial logic parameters from demonstrations via backpropagation. Experimental results validate the effectiveness and scalability of the proposed framework.Code Available: https://github.com/plen1lune/DiffSpaTiaL
NL2SpaTiaL: Generating Geometric Spatio-Temporal Logic Specifications from Natural Language for Manipulation Tasks
Dec 15, 2025Spatio-Temporal Logic (SpaTiaL) offers a principled formalism for expressing geometric spatial requirements-an essential component of robotic manipulation, where object locations, neighborhood relations, pose constraints, and interactions directly determine task success. Yet prior works have largely relied on standard temporal logic (TL), which models only robot trajectories and overlooks object-level interactions. Existing datasets built from randomly generated TL formulas paired with natural-language descriptions therefore cover temporal operators but fail to represent the layered spatial relations that manipulation tasks depend on. To address this gap, we introduce a dataset generation framework that synthesizes SpaTiaL specifications and converts them into natural-language descriptions through a deterministic, semantics-preserving back-translation procedure. This pipeline produces the NL2SpaTiaL dataset, aligning natural language with multi-level spatial relations and temporal objectives to reflect the compositional structure of manipulation tasks. Building on this foundation, we propose a translation-verification framework equipped with a language-based semantic checker that ensures the generated SpaTiaL formulas faithfully encode the semantics specified by the input description. Experiments across a suite of manipulation tasks show that SpaTiaL-based representations yield more interpretable, verifiable, and compositional grounding for instruction following. Project website: https://sites.google.com/view/nl2spatial
An Iterative Approach for Heterogeneous Multi-Agent Route Planning with Resource Transportation Uncertainty and Temporal Logic Goals
Aug 26, 2025This paper presents an iterative approach for heterogeneous multi-agent route planning in environments with unknown resource distributions. We focus on a team of robots with diverse capabilities tasked with executing missions specified using Capability Temporal Logic (CaTL), a formal framework built on Signal Temporal Logic to handle spatial, temporal, capability, and resource constraints. The key challenge arises from the uncertainty in the initial distribution and quantity of resources in the environment. To address this, we introduce an iterative algorithm that dynamically balances exploration and task fulfillment. Robots are guided to explore the environment, identifying resource locations and quantities while progressively refining their understanding of the resource landscape. At the same time, they aim to maximally satisfy the mission objectives based on the current information, adapting their strategies as new data is uncovered. This approach provides a robust solution for planning in dynamic, resource-constrained environments, enabling efficient coordination of heterogeneous teams even under conditions of uncertainty. Our method's effectiveness and performance are demonstrated through simulated case studies.
Learning Optimal Signal Temporal Logic Decision Trees for Classification: A Max-Flow MILP Formulation
Jul 30, 2024



This paper presents a novel framework for inferring timed temporal logic properties from data. The dataset comprises pairs of finite-time system traces and corresponding labels, denoting whether the traces demonstrate specific desired behaviors, e.g. whether the ship follows a safe route or not. Our proposed approach leverages decision-tree-based methods to infer Signal Temporal Logic classifiers using primitive formulae. We formulate the inference process as a mixed integer linear programming optimization problem, recursively generating constraints to determine both data classification and tree structure. Applying a max-flow algorithm on the resultant tree transforms the problem into a global optimization challenge, leading to improved classification rates compared to prior methodologies. Moreover, we introduce a technique to reduce the number of constraints by exploiting the symmetry inherent in STL primitives, which enhances the algorithm's time performance and interpretability. To assess our algorithm's effectiveness and classification performance, we conduct three case studies involving two-class, multi-class, and complex formula classification scenarios.
Rough-Terrain Locomotion and Unilateral Contact Force Regulations With a Multi-Modal Legged Robot
Mar 29, 2021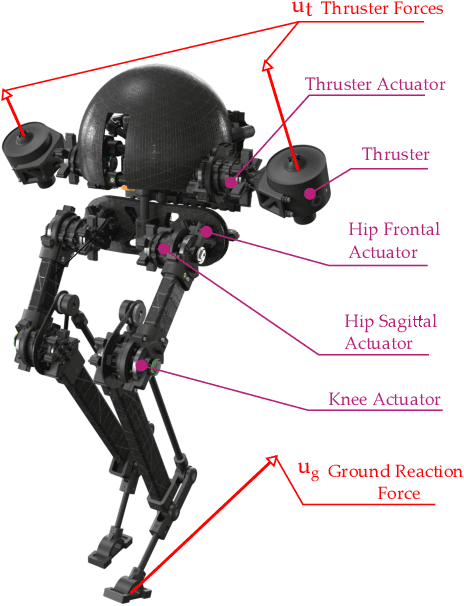
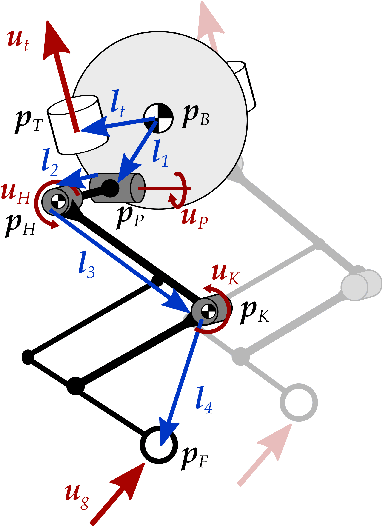
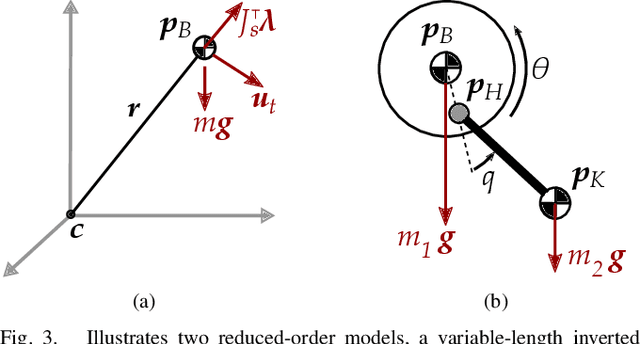
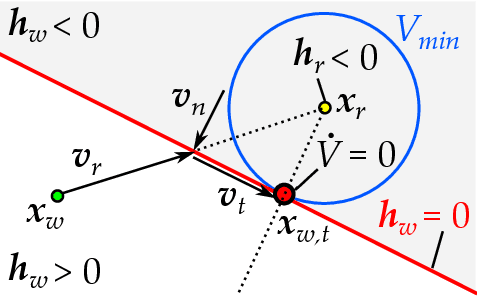
Despite many accomplishments by legged robot designers, state-of-the-art bipedal robots are prone to falling over, cannot negotiate extremely rough terrains and cannot directly regulate unilateral contact forces. Our objective is to integrate merits of legged and aerial robots in a single platform. We will show that the thrusters in a bipedal legged robot called Harpy can be leveraged to stabilize the robot's frontal dynamics and permit jumping over large obstacles which is an unusual capability not reported before. In addition, we will capitalize on the thrusters action in Harpy and will show that one can avoid using costly optimization-based schemes by directly regulating contact forces using an Reference Governor (RGs). We will resolve gait parameters and re-plan them during gait cycles by only assuming well-tuned supervisory controllers. Then, we will focus on RG-based fine-tuning of the joints desired trajectories to satisfy unilateral contact force constraints.