 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Virtual Model Control for Scalable Human-Robot Collaboration in Shared Workspace
Feb 19, 2026We present a decentralized, agent agnostic, and safety-aware control framework for human-robot collaboration based on Virtual Model Control (VMC). In our approach, both humans and robots are embedded in the same virtual-component-shaped workspace, where motion is the result of the interaction with virtual springs and dampers rather than explicit trajectory planning. A decentralized, force-based stall detector identifies deadlocks, which are resolved through negotiation. This reduces the probability of robots getting stuck in the block placement task from up to 61.2% to zero in our experiments. The framework scales without structural changes thanks to the distributed implementation: in experiments we demonstrate safe collaboration with up to two robots and two humans, and in simulation up to four robots, maintaining inter-agent separation at around 20 cm. Results show that the method shapes robot behavior intuitively by adjusting control parameters and achieves deadlock-free operation across team sizes in all tested scenarios.
Real-Time Dynamic Robot-Assisted Hand-Object Interaction via Motion Primitives
May 29, 2024



Advances in artificial intelligence (AI) have been propelling the evolution of human-robot interaction (HRI) technologies. However, significant challenges remain in achieving seamless interactions, particularly in tasks requiring physical contact with humans. These challenges arise from the need for accurate real-time perception of human actions, adaptive control algorithms for robots, and the effective coordination between human and robotic movements. In this paper, we propose an approach to enhancing physical HRI with a focus on dynamic robot-assisted hand-object interaction (HOI). Our methodology integrates hand pose estimation, adaptive robot control, and motion primitives to facilitate human-robot collaboration. Specifically, we employ a transformer-based algorithm to perform real-time 3D modeling of human hands from single RGB images, based on which a motion primitives model (MPM) is designed to translate human hand motions into robotic actions. The robot's action implementation is dynamically fine-tuned using the continuously updated 3D hand models. Experimental validations, including a ring-wearing task, demonstrate the system's effectiveness in adapting to real-time movements and assisting in precise task executions.
Privacy-Preserving Self-Taught Federated Learning for Heterogeneous Data
Feb 11, 2021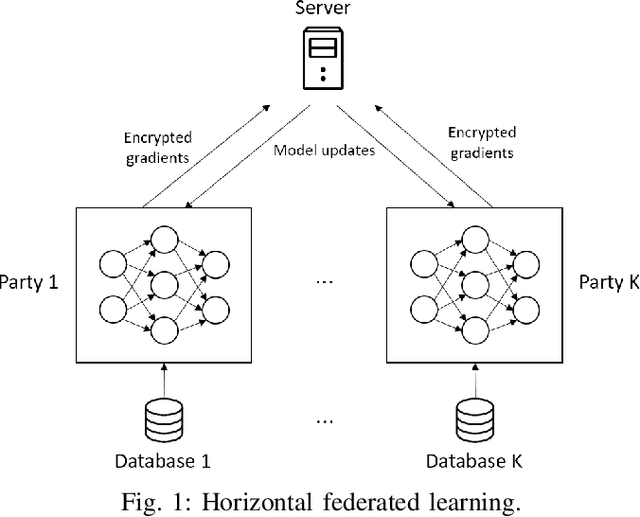
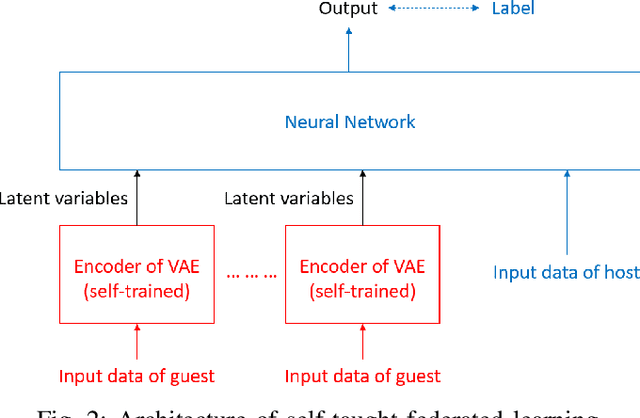
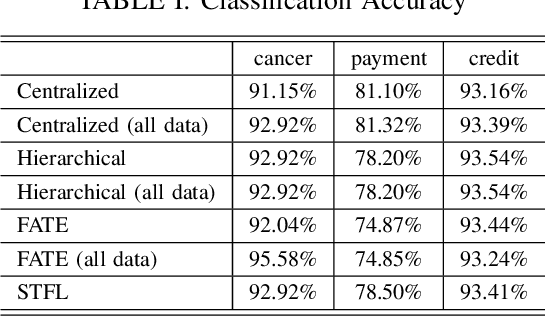
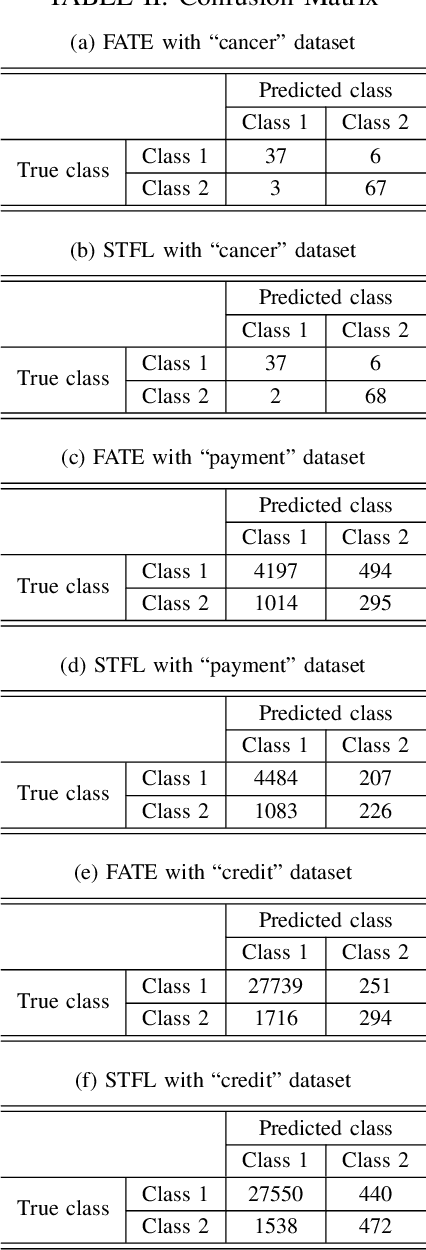
Many application scenarios call for training a machine learning model among multiple participants. Federated learning (FL) was proposed to enable joint training of a deep learning model using the local data in each party without revealing the data to others. Among various types of FL methods, vertical FL is a category to handle data sources with the same ID space and different feature spaces. However, existing vertical FL methods suffer from limitations such as restrictive neural network structure, slow training speed, and often lack the ability to take advantage of data with unmatched IDs. In this work, we propose an FL method called self-taught federated learning to address the aforementioned issues, which uses unsupervised feature extraction techniques for distributed supervised deep learning tasks. In this method, only latent variables are transmitted to other parties for model training, while privacy is preserved by storing the data and parameters of activations, weights, and biases locally. Extensive experiments are performed to evaluate and demonstrate the validity and efficiency of the proposed method.