 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNVSPolicy: Adaptive Novel-View Synthesis for Generalizable Language-Conditioned Policy Learning
May 15, 2025



Recent advances in deep generative models demonstrate unprecedented zero-shot generalization capabilities, offering great potential for robot manipulation in unstructured environments. Given a partial observation of a scene, deep generative models could generate the unseen regions and therefore provide more context, which enhances the capability of robots to generalize across unseen environments. However, due to the visual artifacts in generated images and inefficient integration of multi-modal features in policy learning, this direction remains an open challenge. We introduce NVSPolicy, a generalizable language-conditioned policy learning method that couples an adaptive novel-view synthesis module with a hierarchical policy network. Given an input image, NVSPolicy dynamically selects an informative viewpoint and synthesizes an adaptive novel-view image to enrich the visual context. To mitigate the impact of the imperfect synthesized images, we adopt a cycle-consistent VAE mechanism that disentangles the visual features into the semantic feature and the remaining feature. The two features are then fed into the hierarchical policy network respectively: the semantic feature informs the high-level meta-skill selection, and the remaining feature guides low-level action estimation. Moreover, we propose several practical mechanisms to make the proposed method efficient. Extensive experiments on CALVIN demonstrate the state-of-the-art performance of our method. Specifically, it achieves an average success rate of 90.4\% across all tasks, greatly outperforming the recent methods. Ablation studies confirm the significance of our adaptive novel-view synthesis paradigm. In addition, we evaluate NVSPolicy on a real-world robotic platform to demonstrate its practical applicability.
RayMVSNet++: Learning Ray-based 1D Implicit Fields for Accurate Multi-View Stereo
Jul 16, 2023



Learning-based multi-view stereo (MVS) has by far centered around 3D convolution on cost volumes. Due to the high computation and memory consumption of 3D CNN, the resolution of output depth is often considerably limited. Different from most existing works dedicated to adaptive refinement of cost volumes, we opt to directly optimize the depth value along each camera ray, mimicking the range finding of a laser scanner. This reduces the MVS problem to ray-based depth optimization which is much more light-weight than full cost volume optimization. In particular, we propose RayMVSNet which learns sequential prediction of a 1D implicit field along each camera ray with the zero-crossing point indicating scene depth. This sequential modeling, conducted based on transformer features, essentially learns the epipolar line search in traditional multi-view stereo. We devise a multi-task learning for better optimization convergence and depth accuracy. We found the monotonicity property of the SDFs along each ray greatly benefits the depth estimation. Our method ranks top on both the DTU and the Tanks & Temples datasets over all previous learning-based methods, achieving an overall reconstruction score of 0.33mm on DTU and an F-score of 59.48% on Tanks & Temples. It is able to produce high-quality depth estimation and point cloud reconstruction in challenging scenarios such as objects/scenes with non-textured surface, severe occlusion, and highly varying depth range. Further, we propose RayMVSNet++ to enhance contextual feature aggregation for each ray through designing an attentional gating unit to select semantically relevant neighboring rays within the local frustum around that ray. RayMVSNet++ achieves state-of-the-art performance on the ScanNet dataset. In particular, it attains an AbsRel of 0.058m and produces accurate results on the two subsets of textureless regions and large depth variation.
RayMVSNet: Learning Ray-based 1D Implicit Fields for Accurate Multi-View Stereo
Apr 04, 2022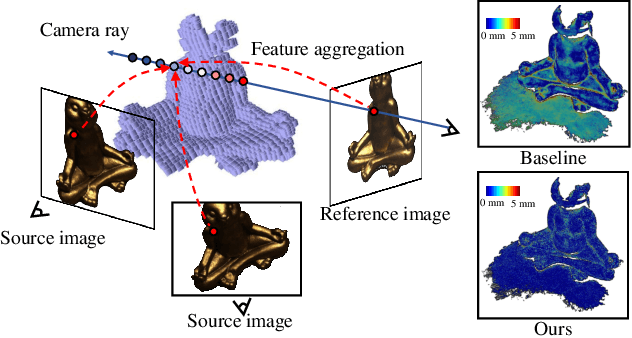
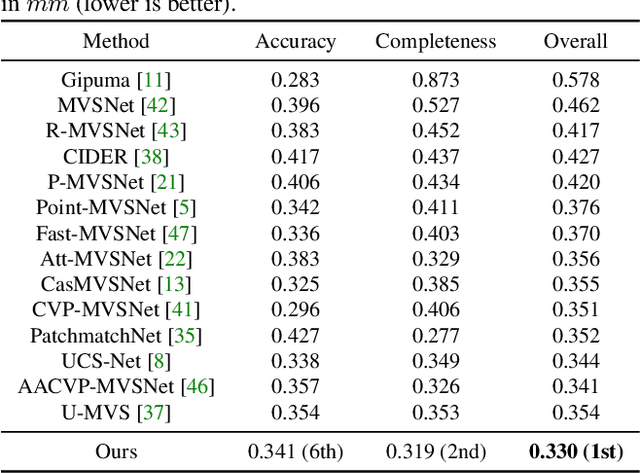
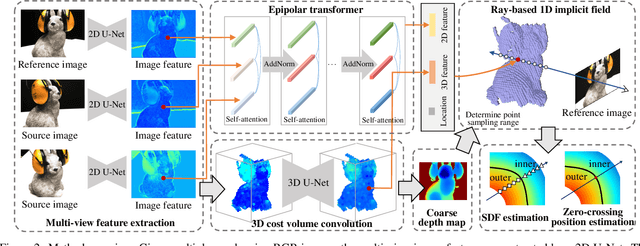
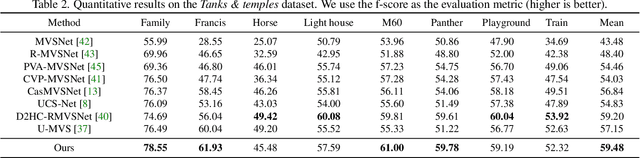
Learning-based multi-view stereo (MVS) has by far centered around 3D convolution on cost volumes. Due to the high computation and memory consumption of 3D CNN, the resolution of output depth is often considerably limited. Different from most existing works dedicated to adaptive refinement of cost volumes, we opt to directly optimize the depth value along each camera ray, mimicking the range (depth) finding of a laser scanner. This reduces the MVS problem to ray-based depth optimization which is much more light-weight than full cost volume optimization. In particular, we propose RayMVSNet which learns sequential prediction of a 1D implicit field along each camera ray with the zero-crossing point indicating scene depth. This sequential modeling, conducted based on transformer features, essentially learns the epipolar line search in traditional multi-view stereo. We also devise a multi-task learning for better optimization convergence and depth accuracy. Our method ranks top on both the DTU and the Tanks \& Temples datasets over all previous learning-based methods, achieving overall reconstruction score of 0.33mm on DTU and f-score of 59.48% on Tanks & Temples.