 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust NLoS Localization in 5G mmWave Networks: Data-based Methods and Performance
Jun 24, 2024



Ensuring smooth mobility management while employing directional beamformed transmissions in 5G millimeter-wave networks calls for robust and accurate user equipment (UE) localization and tracking. In this article, we develop neural network-based positioning models with time- and frequency-domain channel state information (CSI) data in harsh non-line-of-sight (NLoS) conditions. We propose a novel frequency-domain feature extraction, which combines relative phase differences and received powers across resource blocks, and offers robust performance and reliability. Additionally, we exploit the multipath components and propose an aggregate time-domain feature combining time-of-flight, angle-of-arrival and received path-wise powers. Importantly, the temporal correlations are also harnessed in the form of sequence processing neural networks, which prove to be of particular benefit for vehicular UEs. Realistic numerical evaluations in large-scale line-of-sight (LoS)-obstructed urban environment with moving vehicles are provided, building on full ray-tracing based propagation modeling. The results show the robustness of the proposed CSI features in terms of positioning accuracy, and that the proposed models reliably localize UEs even in the absence of a LoS path, clearly outperforming the state-of-the-art with similar or even reduced processing complexity. The proposed sequence-based neural network model is capable of tracking the UE position, speed and heading simultaneously despite the strong uncertainties in the CSI measurements. Finally, it is shown that differences between the training and online inference environments can be efficiently addressed and alleviated through transfer learning.
On Target Detection in the Presence of Clutter in Joint Communication and Sensing Cellular Networks
Apr 18, 2024



Recent works on joint communication and sensing (JCAS) cellular networks have proposed to use time division mode (TDM) and concurrent mode (CM), as alternative methods for sharing the resources between communication and sensing signals. While the performance of these JCAS schemes for object tracking and parameter estimation has been studied in previous works, their performance on target detection in the presence of clutter has not been analyzed. In this paper, we propose a detection scheme for estimating the number of targets in JCAS cellular networks that employ TDM or CM resource sharing. The proposed detection method allows for the presence of clutter and/or temporally correlated noise. This scheme is studied with respect to the JCAS trade-off parameters that allow to control the time slots in TDM and the power resources in CM allocated to sensing and communications. The performance of two fundamental transmit beamforming schemes, typical for JCAS, is compared in terms of the receiver operating characteristics curves. Our results indicate that in general the TDM scheme gives a somewhat better detection performance compared to the CM scheme, although both schemes outperform existing approaches provided that their respective trade-off parameters are tuned properly.
Vehicular Positioning and Tracking in Multipath Non-Line-of-Sight Channels
Mar 31, 2022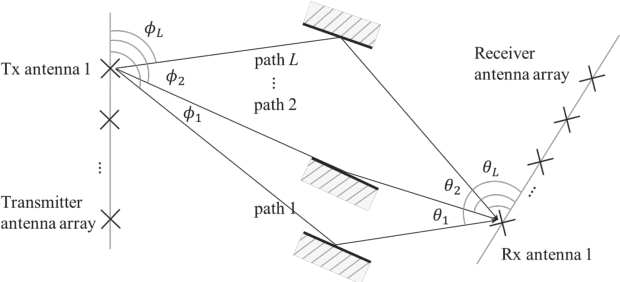
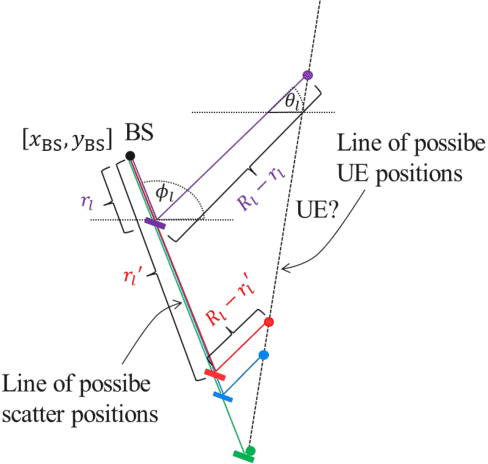
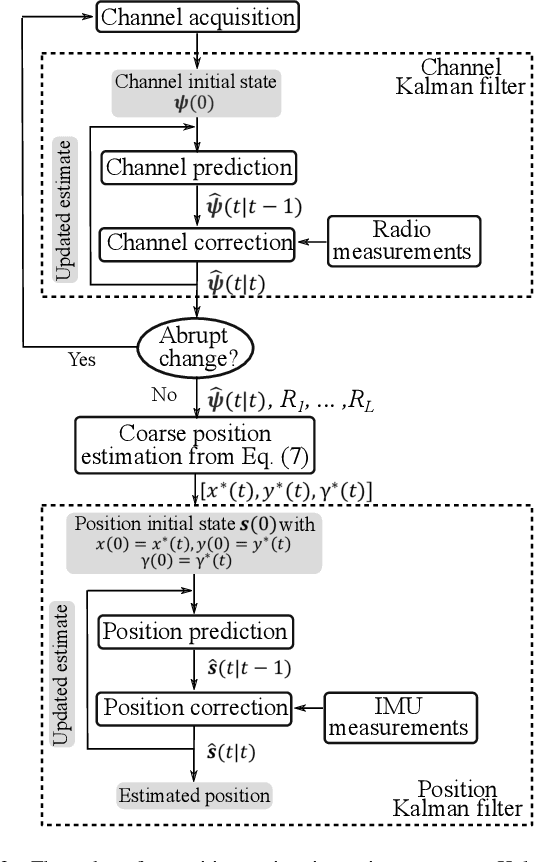
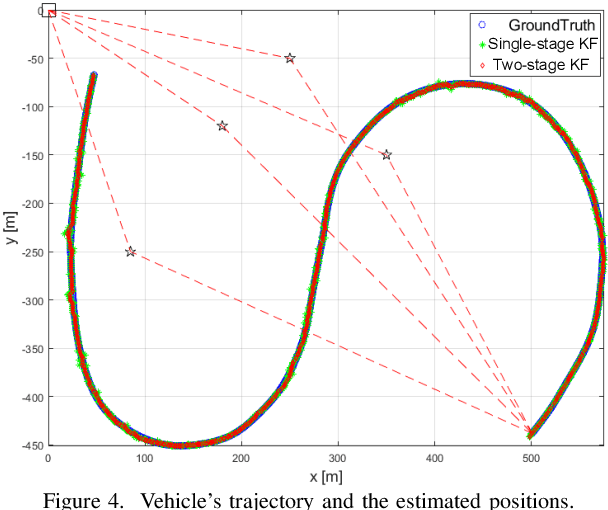
We consider the downlink transmission in a single cell multiple-input multiple-output system, in which the user equipment correspond to a vehicle moving along a given trajectory. This system utilizes millimeter wave channels characterized by multiple non-line-of-sight (NLoS) components. As it has been pointed out in several related works, in such systems radio access network (RAN)-based positioning can effectively improve the positioning accuracy achieved by Global Navigation Satellite Systems. However, the RAN-based positioning accuracy is highly dependent on the quality of the channel estimates, especially if multipath propagation is exploited. Recognizing that the communication channels between the serving base station and the vehicle as well as the geographical position of the vehicle can be advantageously modeled as inter-related autoregressive processes, we propose a two-stage Kalman filter algorithm employing two intertwined filters for channel tracking, position tracking and abrupt channel change detection. The first Kalman filter tracks angles-of-departure and angles-of-arrival associated with the communication channels, which are used to make a coarse position estimation. The second Kalman filter tracks the position of the vehicle utilizing the kinematic parameters of the vehicle. Simulation results clearly show the advantages of using the proposed scheme, which exploits the memoryful property of both the communication channels and the geographical positions, as compared to employing previously proposed single-stage or not properly combined filters in NLoS environments.
On Estimating the Autoregressive Coefficients of Time-Varying Fading Channels
Mar 31, 2022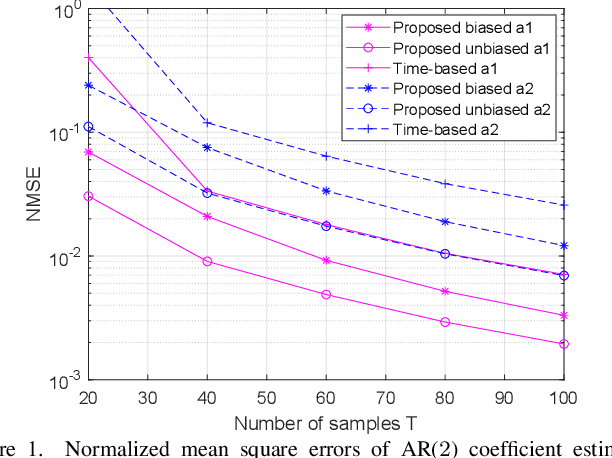
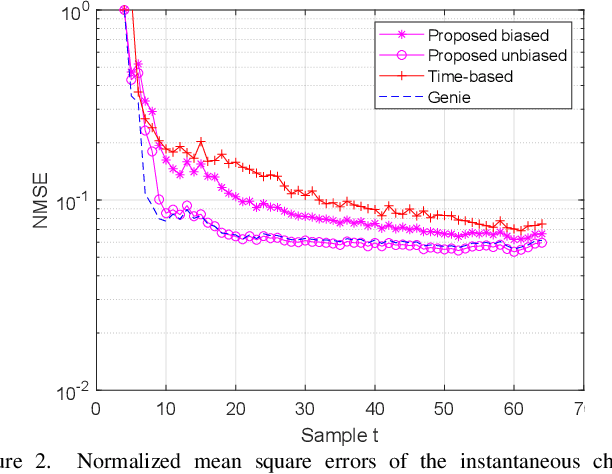
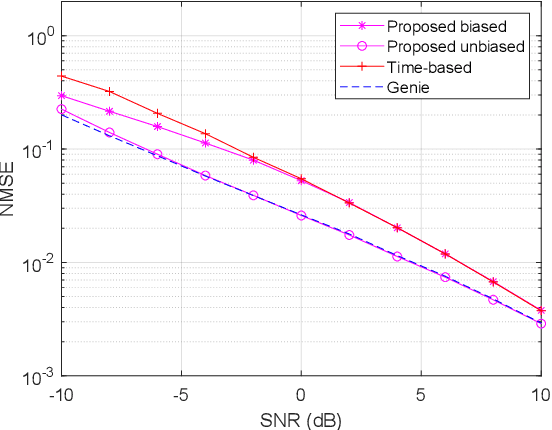
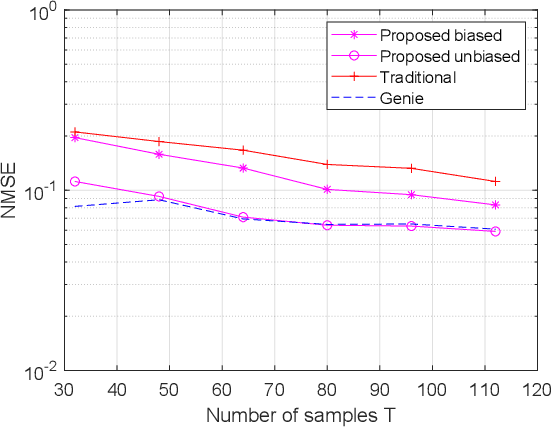
As several previous works have pointed out, the evolution of the wireless channels in multiple input multiple output systems can be advantageously modeled as an autoregressive process. Therefore, estimating the coefficients, and, in particular, the state transition matrix of this autoregressive process is a key to accurate channel estimation, tracking, and prediction in fast fading environments. In this paper we assume a time varying spatially uncorrelated channel, which is approximately the case with proper antenna spacing at the base station in rich scattering environments. We propose a method for autoregressive parameter estimation for the single input multiple output (SIMO) channel. We show an almost sure convergence of the estimated coefficients to the true autoregressive coefficients in large dimensions. We apply the proposed method to SIMO channel tracking.
* 5 pages 4 figures, 18 references