 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemEval-2026 Task 9: Detecting Multilingual, Multicultural and Multievent Online Polarization
Apr 08, 2026We present SemEval-2026 Task 9, a shared task on online polarization detection, covering 22 languages and comprising over 110K annotated instances. Each data instance is multi-labeled with the presence of polarization, polarization type, and polarization manifestation. Participants were asked to predict labels in three sub-tasks: (1) detecting the presence of polarization, (2) identifying the type of polarization, and (3) recognizing the polarization manifestation. The three tasks attracted over 1,000 participants worldwide and more than 10k submission on Codabench. We received final submissions from 67 teams and 73 system description papers. We report the baseline results and analyze the performance of the best-performing systems, highlighting the most common approaches and the most effective methods across different subtasks and languages. The dataset of this task is publicly available.
Artifact Removal and Image Restoration in AFM:A Structured Mask-Guided Directional Inpainting Approach
Feb 03, 2026Atomic Force Microscopy (AFM) enables high-resolution surface imaging at the nanoscale, yet the output is often degraded by artifacts introduced by environmental noise, scanning imperfections, and tip-sample interactions. To address this challenge, a lightweight and fully automated framework for artifact detection and restoration in AFM image analysis is presented. The pipeline begins with a classification model that determines whether an AFM image contains artifacts. If necessary, a lightweight semantic segmentation network, custom-designed and trained on AFM data, is applied to generate precise artifact masks. These masks are adaptively expanded based on their structural orientation and then inpainted using a directional neighbor-based interpolation strategy to preserve 3D surface continuity. A localized Gaussian smoothing operation is then applied for seamless restoration. The system is integrated into a user-friendly GUI that supports real-time parameter adjustments and batch processing. Experimental results demonstrate the effective artifact removal while preserving nanoscale structural details, providing a robust, geometry-aware solution for high-fidelity AFM data interpretation.
Seeing the Threat: Vulnerabilities in Vision-Language Models to Adversarial Attack
May 28, 2025Large Vision-Language Models (LVLMs) have shown remarkable capabilities across a wide range of multimodal tasks. However, their integration of visual inputs introduces expanded attack surfaces, thereby exposing them to novel security vulnerabilities. In this work, we conduct a systematic representational analysis to uncover why conventional adversarial attacks can circumvent the safety mechanisms embedded in LVLMs. We further propose a novel two stage evaluation framework for adversarial attacks on LVLMs. The first stage differentiates among instruction non compliance, outright refusal, and successful adversarial exploitation. The second stage quantifies the degree to which the model's output fulfills the harmful intent of the adversarial prompt, while categorizing refusal behavior into direct refusals, soft refusals, and partial refusals that remain inadvertently helpful. Finally, we introduce a normative schema that defines idealized model behavior when confronted with harmful prompts, offering a principled target for safety alignment in multimodal systems.
POLAR: A Benchmark for Multilingual, Multicultural, and Multi-Event Online Polarization
May 27, 2025Online polarization poses a growing challenge for democratic discourse, yet most computational social science research remains monolingual, culturally narrow, or event-specific. We introduce POLAR, a multilingual, multicultural, and multievent dataset with over 23k instances in seven languages from diverse online platforms and real-world events. Polarization is annotated along three axes: presence, type, and manifestation, using a variety of annotation platforms adapted to each cultural context. We conduct two main experiments: (1) we fine-tune six multilingual pretrained language models in both monolingual and cross-lingual setups; and (2) we evaluate a range of open and closed large language models (LLMs) in few-shot and zero-shot scenarios. Results show that while most models perform well on binary polarization detection, they achieve substantially lower scores when predicting polarization types and manifestations. These findings highlight the complex, highly contextual nature of polarization and the need for robust, adaptable approaches in NLP and computational social science. All resources will be released to support further research and effective mitigation of digital polarization globally.
A Hybrid Position/Force Controller for Joint Robots
Nov 01, 2020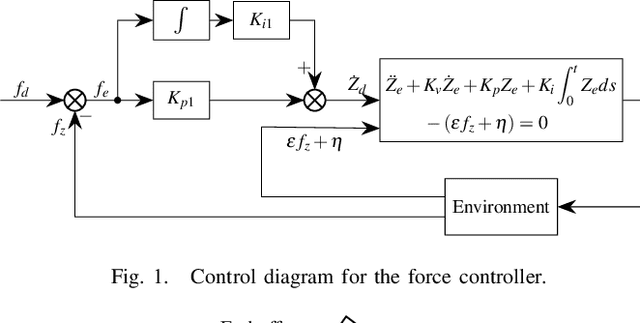
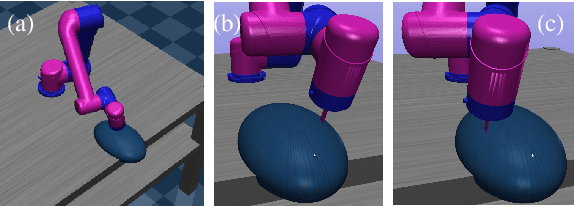
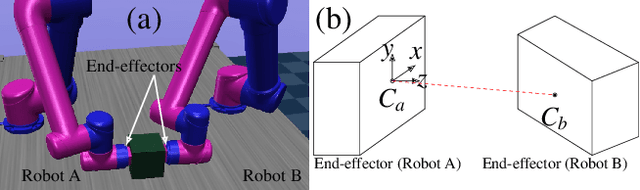
In this paper, we present a hybrid position/force controller for operating joint robots. The hybrid controller has two goals---motion tracking and force regulating. As long as these two goals are not mutually exclusive, they can be decoupled in some way. In this work, we make use of the smooth and invertible mapping from joint space to task space to decouple the two control goals and design controllers separately. The traditional motion controller in task space is used for motion control, while the force controller is designed through manipulating the desired trajectory to regulate the force indirectly. Two case studies---contour tracking/polishing surfaces and grabbing boxes with two robotic arms---are presented to show the efficacy of the hybrid controller, and simulations with physics engines are carried out to validate the efficacy of the proposed method.