 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-modal Transfer Learning between Biological Foundation Models
Jun 20, 2024



Biological sequences encode fundamental instructions for the building blocks of life, in the form of DNA, RNA, and proteins. Modeling these sequences is key to understand disease mechanisms and is an active research area in computational biology. Recently, Large Language Models have shown great promise in solving certain biological tasks but current approaches are limited to a single sequence modality (DNA, RNA, or protein). Key problems in genomics intrinsically involve multiple modalities, but it remains unclear how to adapt general-purpose sequence models to those cases. In this work we propose a multi-modal model that connects DNA, RNA, and proteins by leveraging information from different pre-trained modality-specific encoders. We demonstrate its capabilities by applying it to the largely unsolved problem of predicting how multiple RNA transcript isoforms originate from the same gene (i.e. same DNA sequence) and map to different transcription expression levels across various human tissues. We show that our model, dubbed IsoFormer, is able to accurately predict differential transcript expression, outperforming existing methods and leveraging the use of multiple modalities. Our framework also achieves efficient transfer knowledge from the encoders pre-training as well as in between modalities. We open-source our model, paving the way for new multi-modal gene expression approaches.
Multi-objective evolution for Generalizable Policy Gradient Algorithms
Apr 08, 2022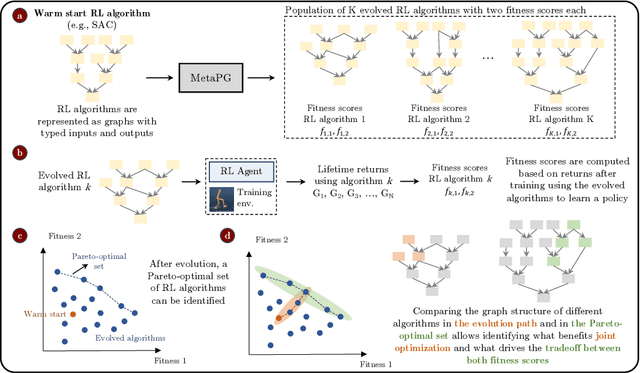
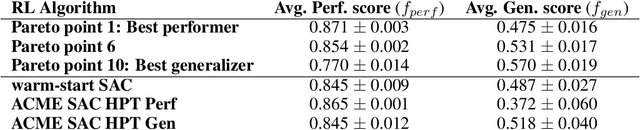
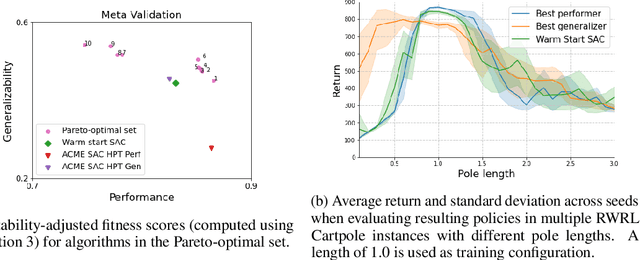
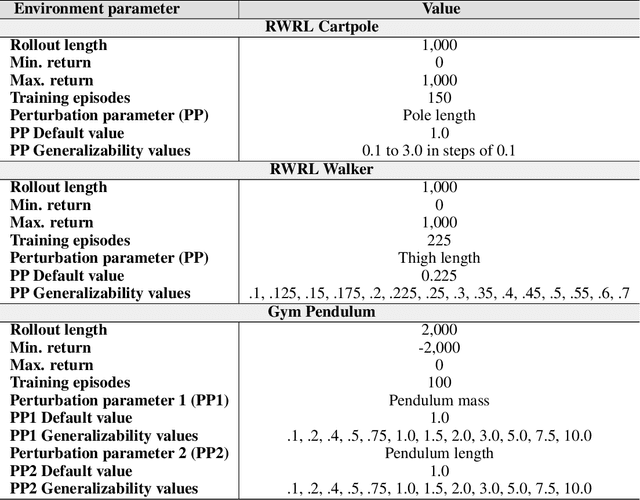
Performance, generalizability, and stability are three Reinforcement Learning (RL) challenges relevant to many practical applications in which they present themselves in combination. Still, state-of-the-art RL algorithms fall short when addressing multiple RL objectives simultaneously and current human-driven design practices might not be well-suited for multi-objective RL. In this paper we present MetaPG, an evolutionary method that discovers new RL algorithms represented as graphs, following a multi-objective search criteria in which different RL objectives are encoded in separate fitness scores. Our findings show that, when using a graph-based implementation of Soft Actor-Critic (SAC) to initialize the population, our method is able to find new algorithms that improve upon SAC's performance and generalizability by 3% and 17%, respectively, and reduce instability up to 65%. In addition, we analyze the graph structure of the best algorithms in the population and offer an interpretation of specific elements that help trading performance for generalizability and vice versa. We validate our findings in three different continuous control tasks: RWRL Cartpole, RWRL Walker, and Gym Pendulum.
Towards Autonomous Satellite Communications: An AI-based Framework to Address System-level Challenges
Dec 11, 2021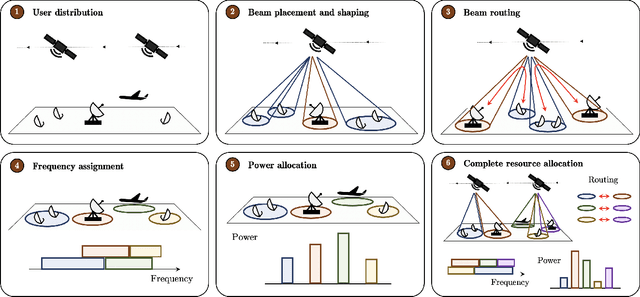
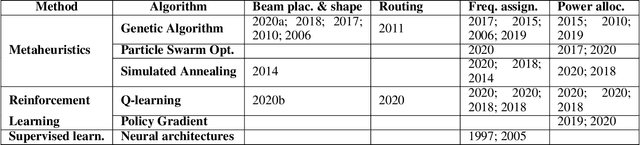
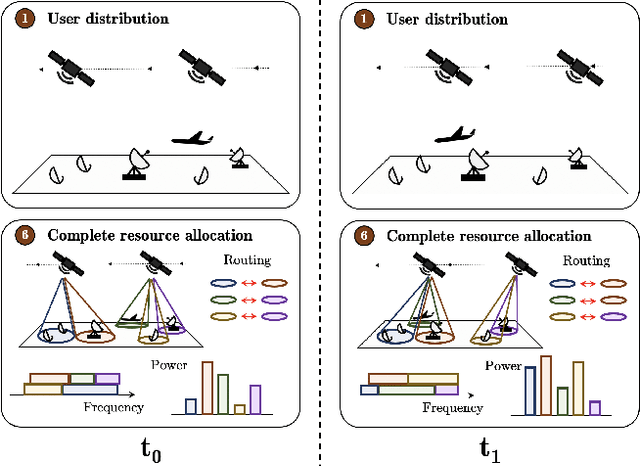
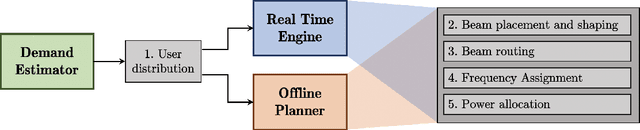
The next generation of satellite constellations is designed to better address the future needs of our connected society: highly-variable data demand, mobile connectivity, and reaching more under-served regions. Artificial Intelligence (AI) and learning-based methods are expected to become key players in the industry, given the poor scalability and slow reaction time of current resource allocation mechanisms. While AI frameworks have been validated for isolated communication tasks or subproblems, there is still not a clear path to achieve fully-autonomous satellite systems. Part of this issue results from the focus on subproblems when designing models, instead of the necessary system-level perspective. In this paper we try to bridge this gap by characterizing the system-level needs that must be met to increase satellite autonomy, and introduce three AI-based components (Demand Estimator, Offline Planner, and Real Time Engine) that jointly address them. We first do a broad literature review on the different subproblems and identify the missing links to the system-level goals. In response to these gaps, we outline the three necessary components and highlight their interactions. We also discuss how current models can be incorporated into the framework and possible directions of future work.
Evaluating the progress of Deep Reinforcement Learning in the real world: aligning domain-agnostic and domain-specific research
Jul 07, 2021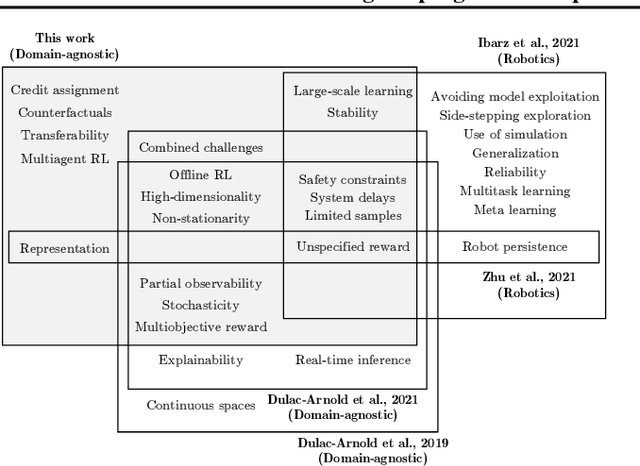
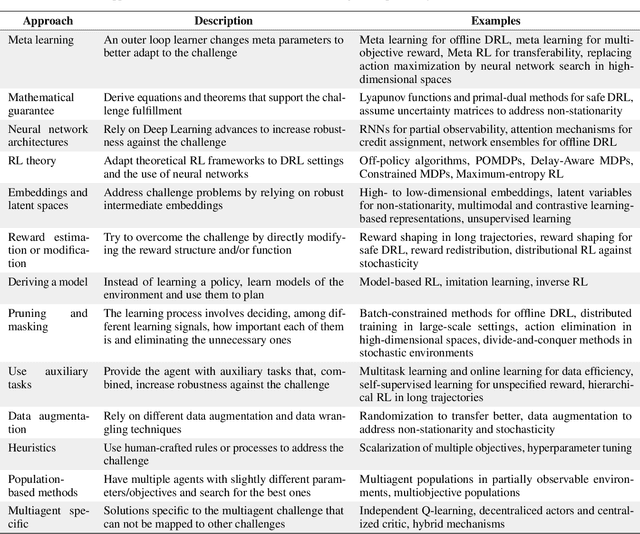
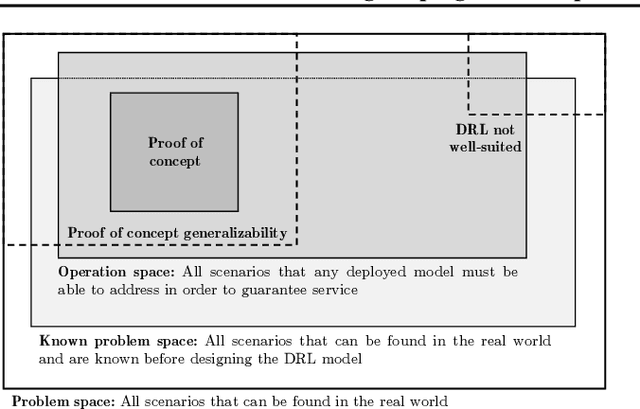
Deep Reinforcement Learning (DRL) is considered a potential framework to improve many real-world autonomous systems; it has attracted the attention of multiple and diverse fields. Nevertheless, the successful deployment in the real world is a test most of DRL models still need to pass. In this work we focus on this issue by reviewing and evaluating the research efforts from both domain-agnostic and domain-specific communities. On one hand, we offer a comprehensive summary of DRL challenges and summarize the different proposals to mitigate them; this helps identifying five gaps of domain-agnostic research. On the other hand, from the domain-specific perspective, we discuss different success stories and argue why other models might fail to be deployed. Finally, we take up on ways to move forward accounting for both perspectives.