 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeam O2AS at the World Robot Summit 2018: An Approach to Robotic Kitting and Assembly Tasks using General Purpose Grippers and Tools
Mar 05, 2020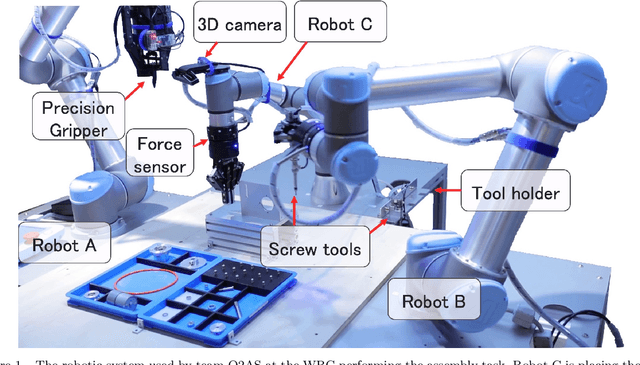
We propose a versatile robotic system for kitting and assembly tasks which uses no jigs or commercial tool changers. Instead of specialized end effectors, it uses its two-finger grippers to grasp and hold tools to perform subtasks such as screwing and suctioning. A third gripper is used as a precision picking and centering tool, and uses in-built passive compliance to compensate for small position errors and uncertainty. A novel grasp point detection for bin picking is described for the kitting task, using a single depth map. Using the proposed system we competed in the Assembly Challenge of the Industrial Robotics Category of the World Robot Challenge at the World Robot Summit 2018, obtaining 4th place and the SICE award for lean design and versatile tool use. We show the effectiveness of our approach through experiments performed during the competition.
Quickly Inserting Pegs into Uncertain Holes using Multi-view Images and Deep Network Trained on Synthetic Data
Feb 25, 2019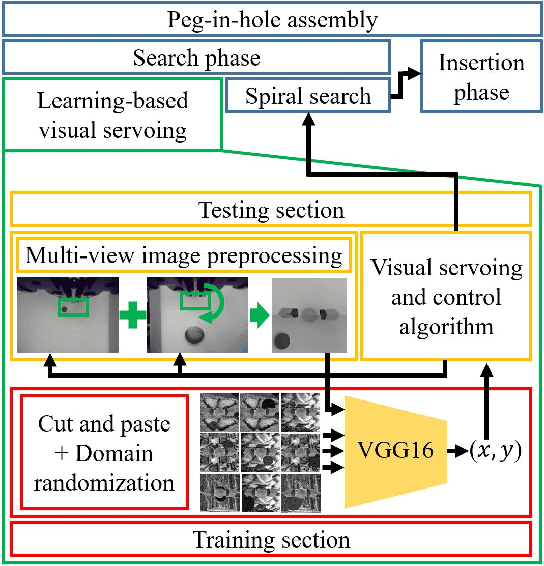
This paper uses robots to assemble pegs into holes on surfaces with different colors and textures. It especially targets at the problem of peg-in-hole assembly with initial position uncertainty. Two in-hand cameras and a force-torque sensor are used to account for the position uncertainty. A program sequence comprising learning-based visual servoing, spiral search, and impedance control is implemented to perform the peg-in-hole task with feedback from the above sensors. Contributions are mainly made in the learning-based visual servoing of the sequence, where a deep neural network is trained with various sets of synthetic data generated using the concept of domain randomization to predict where a hole is. In the experiments and analysis section, the network is analyzed and compared, and a real-world robotic system to insert pegs to holes using the proposed method is implemented. The results show that the implemented peg-in-hole assembly system can perform successful peg-in-hole insertions on surfaces with various colors and textures. It can generally speed up the entire peg-in-hole process.
A Double Jaw Hand Designed for Multi-object Assembly
Jul 30, 2018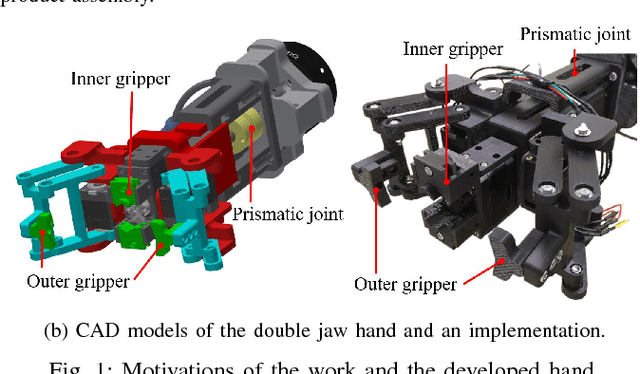
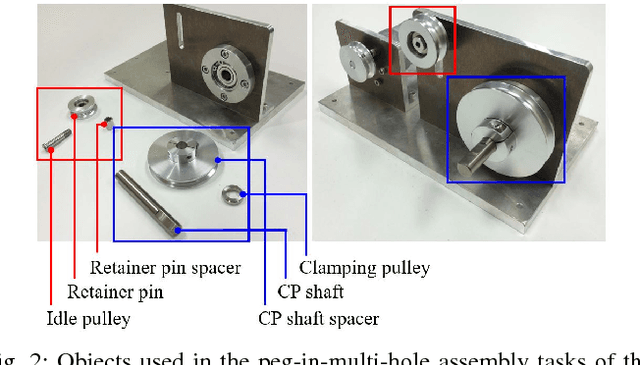
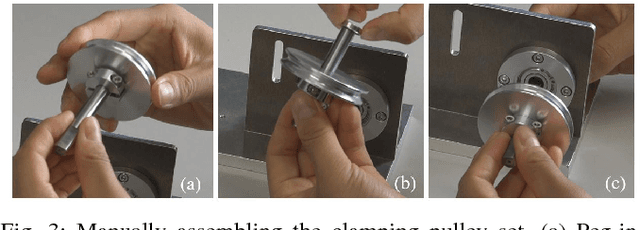
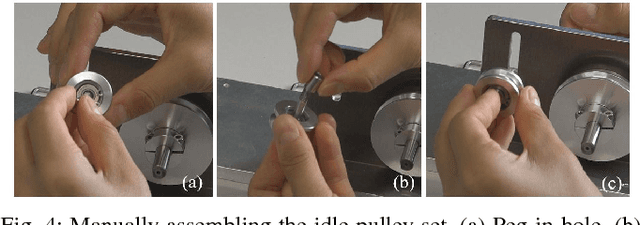
This paper presents a double jaw hand for industrial assembly. The hand comprises two orthogonal parallel grippers with different mechanisms. The inner gripper is made of a crank-slider mechanism which is compact and able to firmly hold objects like shafts. The outer gripper is made of a parallelogram that has large stroke to hold big objects like pulleys. The two grippers are connected by a prismatic joint along the hand's approaching vector. The hand is able to hold two objects and perform in-hand manipulation like pull-in (insertion) and push-out (ejection). This paper presents the detailed design and implementation of the hand, and demonstrates the advantages by performing experiments on two sets of peg-in-multi-hole assembly tasks as parts of the World Robot Challenge (WRC) 2018 using a bimanual robot.