 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Implicit MPC: Controlling Diverse Quadruped Motions Without Pre-Planned Contact Modes or Trajectories
Dec 14, 2023



This paper presents a contact-implicit model predictive control (MPC) framework for the real-time discovery of multi-contact motions, without predefined contact mode sequences or foothold positions. This approach utilizes the contact-implicit differential dynamic programming (DDP) framework, merging the hard contact model with a linear complementarity constraint. We propose the analytical gradient of the contact impulse based on relaxed complementarity constraints to further the exploration of a variety of contact modes. By leveraging a hard contact model-based simulation and computation of search direction through a smooth gradient, our methodology identifies dynamically feasible state trajectories, control inputs, and contact forces while simultaneously unveiling new contact mode sequences. However, the broadened scope of contact modes does not always ensure real-world applicability. Recognizing this, we implemented differentiable cost terms to guide foot trajectories and make gait patterns. Furthermore, to address the challenge of unstable initial roll-outs in an MPC setting, we employ the multiple shooting variant of DDP. The efficacy of the proposed framework is validated through simulations and real-world demonstrations using a 45 kg HOUND quadruped robot, performing various tasks in simulation and showcasing actual experiments involving a forward trot and a front-leg rearing motion.
Real time A* Adaptive Action Set Footstep Planning with Human Locomotion Energy Approximations Considering Angle Difference for Heuristic Function
Nov 02, 2022



The problem of navigating a bipedal robot to a desired destination in various environments is very important. However, it is very difficult to solve the navigation problem in real time because the computation time is very long due to the nature of the biped robot having a high degree of freedom. In order to overcome this, many scientists suggested navigation through the footstep planning. Usually footstep planning use the shortest distance or angles as the objective function based on the A * algorithm. Recently, the energy required for human walking, which is widely used in human dynamics, approximated by a polynomial function is proposed as a better cost function that explains the movement of the bipedal robot. In addition, for the real time navigation, using the action set of the A * algorithm not fixed, but the number changing according to the situation, so that the computation time does not increase much and the methods of considering the collision with the external environment are suggested as a practical method. In this thesis, polynomial function approximating the energy required for human walking is adopted as a cost function, and heuristic function considering the angular difference between the robot and the destination which is not shown in the previous studies is newly proposed and proved. In addition, a new method to integrate the adaptive behavior set and energy related to human walking is proposed. Furthermore, efficient collision avoidance method and a method to reduce the local minimum problem is proposed in this framework. Finally, footstep planning algorithm with all of these features into the mapping algorithm and the walking algorithm to solve the navigation problem is validated with simulation and real robot.
Monte Carlo Tree Search Gait Planner for Non-Gaited Legged System Control
May 28, 2022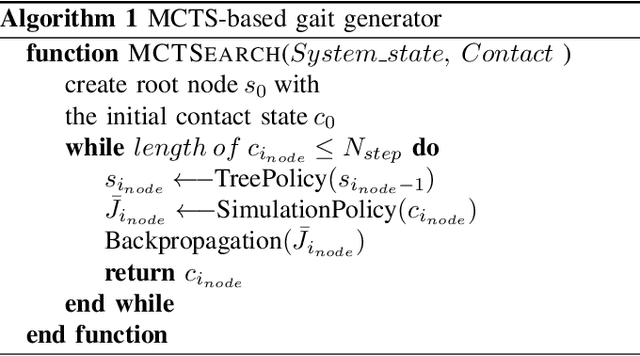
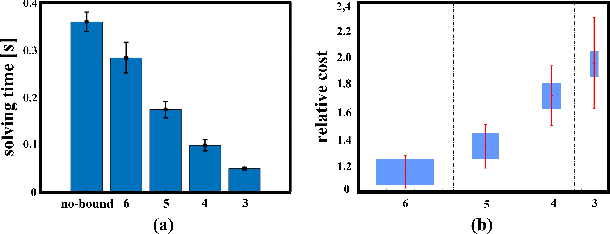
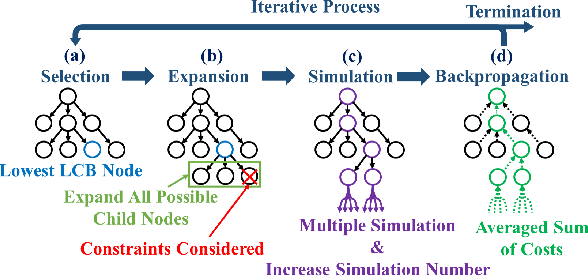
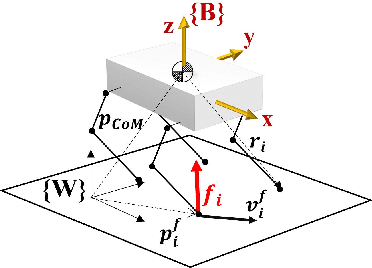
In this work, a non-gaited framework for legged system locomotion is presented. The approach decouples the gait sequence optimization by considering the problem as a decision-making process. The redefined contact sequence problem is solved by utilizing a Monte Carlo Tree Search (MCTS) algorithm that exploits optimization-based simulations to evaluate the best search direction. The proposed scheme has proven to have a good trade-off between exploration and exploitation of the search space compared to the state-of-the-art Mixed-Integer Quadratic Programming (MIQP). The model predictive control (MPC) utilizes the gait generated by the MCTS to optimize the ground reaction forces and future footholds position. The simulation results, performed on a quadruped robot, showed that the proposed framework could generate known periodic gait and adapt the contact sequence to the encountered conditions, including external forces and terrain with unknown and variable properties. When tested on robots with different layouts, the system has also shown its reliability.