 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTissUnet: Improved Extracranial Tissue and Cranium Segmentation for Children through Adulthood
Jun 06, 2025



Extracranial tissues visible on brain magnetic resonance imaging (MRI) may hold significant value for characterizing health conditions and clinical decision-making, yet they are rarely quantified. Current tools have not been widely validated, particularly in settings of developing brains or underlying pathology. We present TissUnet, a deep learning model that segments skull bone, subcutaneous fat, and muscle from routine three-dimensional T1-weighted MRI, with or without contrast enhancement. The model was trained on 155 paired MRI-computed tomography (CT) scans and validated across nine datasets covering a wide age range and including individuals with brain tumors. In comparison to AI-CT-derived labels from 37 MRI-CT pairs, TissUnet achieved a median Dice coefficient of 0.79 [IQR: 0.77-0.81] in a healthy adult cohort. In a second validation using expert manual annotations, median Dice was 0.83 [IQR: 0.83-0.84] in healthy individuals and 0.81 [IQR: 0.78-0.83] in tumor cases, outperforming previous state-of-the-art method. Acceptability testing resulted in an 89% acceptance rate after adjudication by a tie-breaker(N=108 MRIs), and TissUnet demonstrated excellent performance in the blinded comparative review (N=45 MRIs), including both healthy and tumor cases in pediatric populations. TissUnet enables fast, accurate, and reproducible segmentation of extracranial tissues, supporting large-scale studies on craniofacial morphology, treatment effects, and cardiometabolic risk using standard brain T1w MRI.
RSV: Robotic Sonography for Thyroid Volumetry
Dec 13, 2021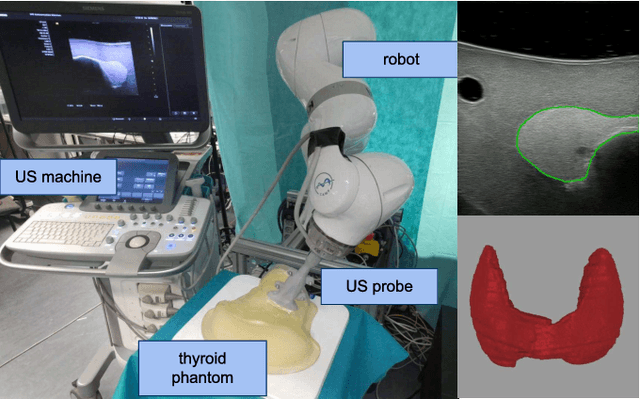
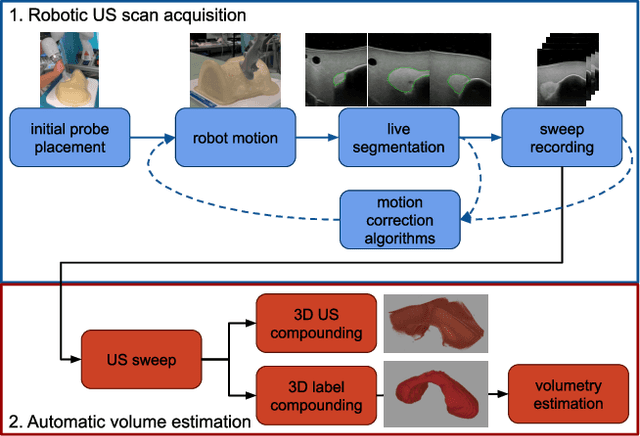
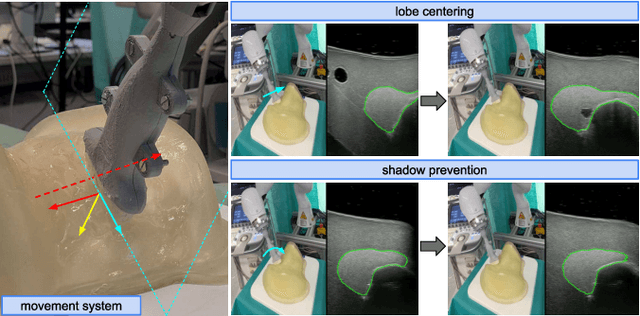
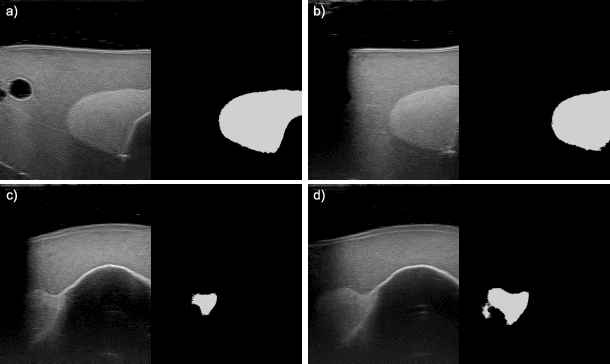
In nuclear medicine, radioiodine therapy is prescribed to treat diseases like hyperthyroidism. The calculation of the prescribed dose depends, amongst other factors, on the thyroid volume. This is currently estimated using conventional 2D ultrasound imaging. However, this modality is inherently user-dependant, resulting in high variability in volume estimations. To increase reproducibility and consistency, we uniquely combine a neural network-based segmentation with an automatic robotic ultrasound scanning for thyroid volumetry. The robotic acquisition is achieved by using a 6 DOF robotic arm with an attached ultrasound probe. Its movement is based on an online segmentation of each thyroid lobe and the appearance of the US image. During post-processing, the US images are segmented to obtain a volume estimation. In an ablation study, we demonstrated the superiority of the motion guidance algorithms for the robot arm movement compared to a naive linear motion, executed by the robot in terms of volumetric accuracy. In a user study on a phantom, we compared conventional 2D ultrasound measurements with our robotic system. The mean volume measurement error of ultrasound expert users could be significantly decreased from 20.85+/-16.10% to only 8.23+/-3.10% compared to the ground truth. This tendency was observed even more in non-expert users where the mean error improvement with the robotic system was measured to be as high as $85\%$ which clearly shows the advantages of the robotic support.