 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphology-Guided Cross-Task Coupling for Joint Building Height and Footprint Estimation
May 06, 2026Building height (BH) and building footprint (BF) jointly describe the vertical and horizontal extent of the built environment and are required inputs for urban climate, disaster-risk, and population-mapping models. The two parameters are coupled through floor-area-ratio (FAR) constraints, yet remote-sensing approaches typically treat them as independent regression targets. We argue that explicitly encoding this cross-task coupling is more impactful than further refining individual encoders, and propose MorphoFormer, a joint BH/BF estimation framework built around two complementary mechanisms: (i) a BF-Guided Task Decoder (BGTD) that gates the height branch via cross-attention on a footprint-derived morphology context, and (ii) a Morphology Consistency Loss (MCL) that supervises a height-from-footprint surrogate against the ground-truth BH, indirectly forcing the BF feature to encode height-correlated structure. The encoder is a single-stage Swin backbone fed by Sentinel-1 SAR, Sentinel-2 multispectral, and DEM inputs, trained and evaluated on a geo-blocked split of 54 cities. Against a Swin-MTL baseline at identical receptive field, MorphoFormer reduces BH test RMSE from 3.39 to 3.15 m (R^2 improves 0.62 -> 0.67) with BF R^2 stable at 0.80. Controlled ablations at identical capacity attribute most of this 0.24 m improvement to the two proposed mechanisms: removing BGTD raises BH RMSE by 0.11 m and removing MCL raises it by 0.11 m, with the residual approximately 0.02 m falling within the noise floor of encoder-side variations. Because both mechanisms act on cross-task representations rather than pixels, the design carries no intrinsic dependence on input resolution.
GISclaw: An Open-Source LLM-Powered Agent System for Full-Stack Geospatial Analysis
Mar 27, 2026The convergence of Large Language Models (LLMs) and Geographic Information Science has opened new avenues for automating complex geospatial analysis. However, existing LLM-powered GIS agents are constrained by limited data-type coverage (vector-only), reliance on proprietary GIS platforms, and single-model architectures that preclude systematic comparisons. We present GISclaw, an open-source agent system that integrates an LLM reasoning core with a persistent Python sandbox, a comprehensive suite of open-source GIS libraries (GeoPandas, rasterio, scipy, scikit-learn), and a web-based interactive interface for full-stack geospatial analysis spanning vector, raster, and tabular data. GISclaw implements two pluggable agent architectures -- a Single Agent ReAct loop and a Dual Agent Plan-Execute-Replan pipeline -- and supports six heterogeneous LLM backends ranging from cloud-hosted flagship models (GPT-5.4) to locally deployed 14B models on consumer GPUs. Through three key engineering innovations -- Schema Analysis bridging the task-data information gap, Domain Knowledge injection for domain-specific workflows, and an Error Memory mechanism for intelligent self-correction -- GISclaw achieves up to 96% task success on the 50-task GeoAnalystBench benchmark. Systematic evaluation across 600 model--architecture--task combinations reveals that the Dual Agent architecture consistently degrades strong models while providing marginal gains for weaker ones. We further propose a three-layer evaluation protocol incorporating code structure analysis, reasoning process assessment, and type-specific output verification for comprehensive GIS agent assessment. The system and all evaluation code are publicly available.
GuideDog: A Real-World Egocentric Multimodal Dataset for Blind and Low-Vision Accessibility-Aware Guidance
Mar 17, 2025



Mobility remains a significant challenge for the 2.2 billion people worldwide affected by blindness and low vision (BLV), with 7% of visually impaired individuals experiencing falls at least once a month. While recent advances in Multimodal Large Language Models (MLLMs) offer promising opportunities for BLV assistance, their development has been hindered by limited datasets. This limitation stems from the fact that BLV-aware annotation requires specialized domain knowledge and intensive labor. To address this gap, we introduce GuideDog, a novel accessibility-aware guide dataset containing 22K image-description pairs (including 2K human-annotated pairs) that capture diverse real-world scenes from a pedestrian's viewpoint. Our approach shifts the annotation burden from generation to verification through a collaborative human-AI framework grounded in established accessibility standards, significantly improving efficiency while maintaining high-quality annotations. We also develop GuideDogQA, a subset of 818 samples featuring multiple-choice questions designed to evaluate fine-grained visual perception capabilities, specifically object recognition and relative depth perception. Our experimental results highlight the importance of accurate spatial understanding for effective BLV guidance. GuideDog and GuideDogQA will advance research in MLLM-based assistive technologies for BLV individuals while contributing to broader applications in understanding egocentric scenes for robotics and augmented reality. The code and dataset will be publicly available.
A Read-Write Memory Network for Movie Story Understanding
Mar 16, 2018
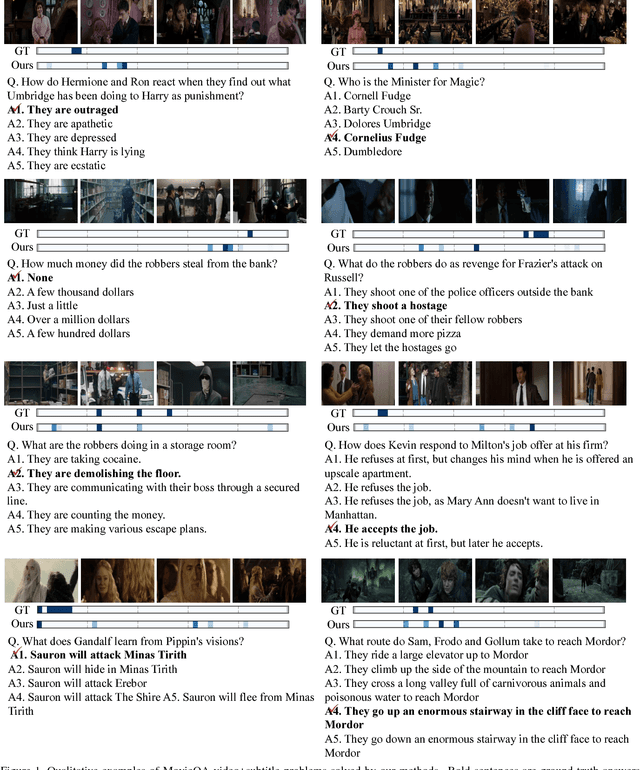
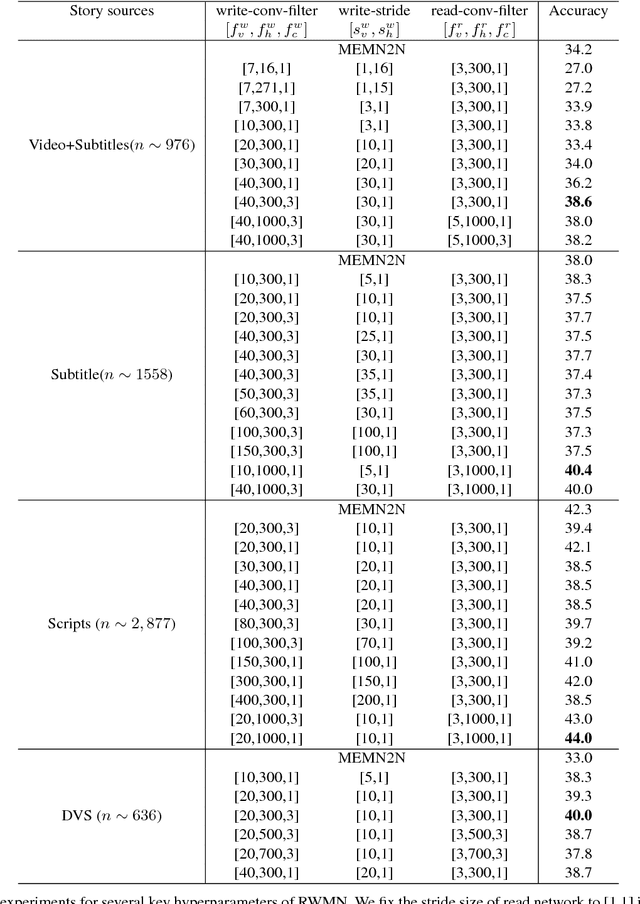
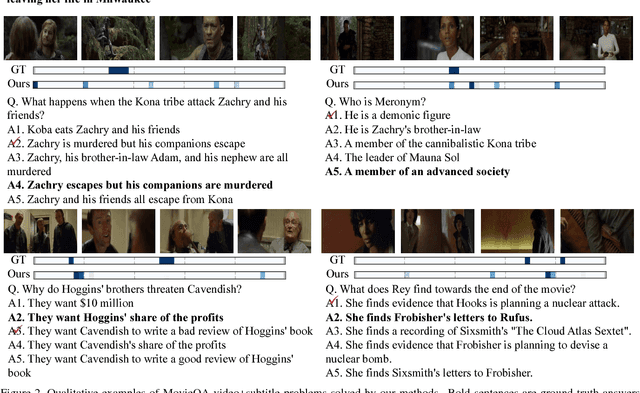
We propose a novel memory network model named Read-Write Memory Network (RWMN) to perform question and answering tasks for large-scale, multimodal movie story understanding. The key focus of our RWMN model is to design the read network and the write network that consist of multiple convolutional layers, which enable memory read and write operations to have high capacity and flexibility. While existing memory-augmented network models treat each memory slot as an independent block, our use of multi-layered CNNs allows the model to read and write sequential memory cells as chunks, which is more reasonable to represent a sequential story because adjacent memory blocks often have strong correlations. For evaluation, we apply our model to all the six tasks of the MovieQA benchmark, and achieve the best accuracies on several tasks, especially on the visual QA task. Our model shows a potential to better understand not only the content in the story, but also more abstract information, such as relationships between characters and the reasons for their actions.
Encoding Video and Label Priors for Multi-label Video Classification on YouTube-8M dataset
Jul 12, 2017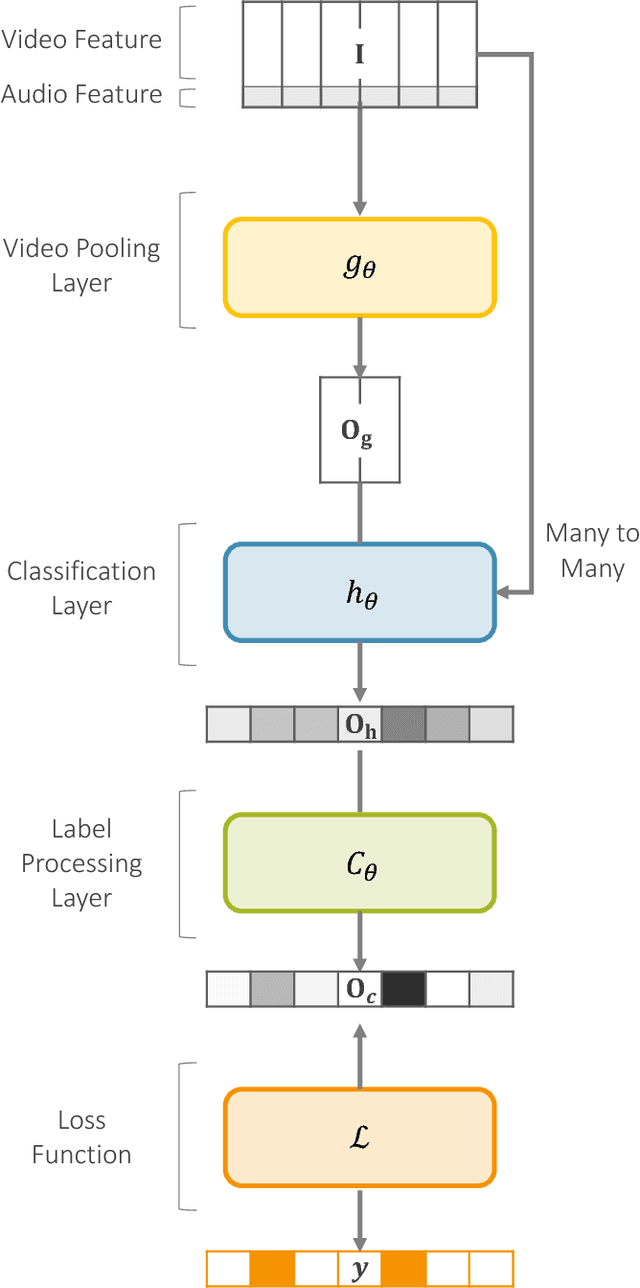
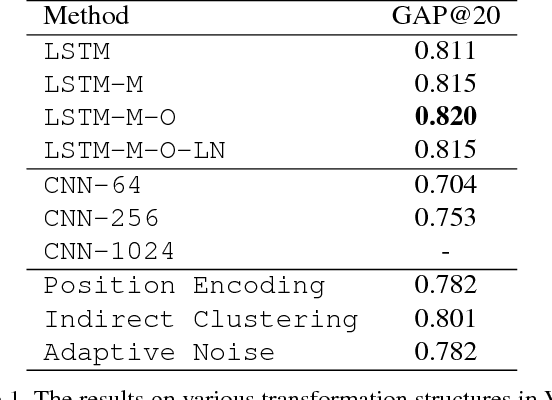
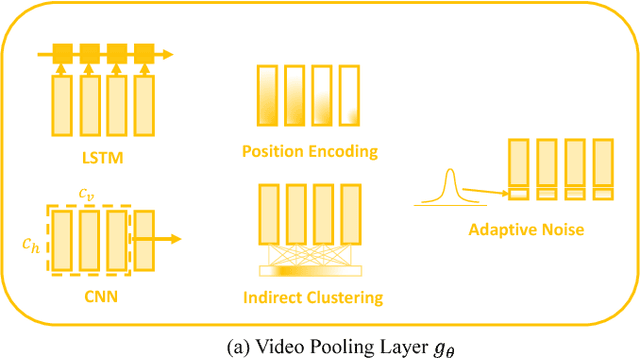
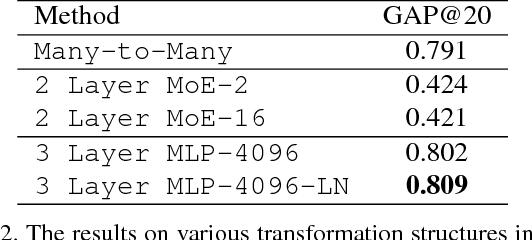
YouTube-8M is the largest video dataset for multi-label video classification. In order to tackle the multi-label classification on this challenging dataset, it is necessary to solve several issues such as temporal modeling of videos, label imbalances, and correlations between labels. We develop a deep neural network model, which consists of four components: the frame encoder, the classification layer, the label processing layer, and the loss function. We introduce our newly proposed methods and discusses how existing models operate in the YouTube-8M Classification Task, what insights they have, and why they succeed (or fail) to achieve good performance. Most of the models we proposed are very high compared to the baseline models, and the ensemble of the models we used is 8th in the Kaggle Competition.