 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Label Stereo Matching for Transparent Scene Depth Estimation
May 20, 2025In this paper, we present a multi-label stereo matching method to simultaneously estimate the depth of the transparent objects and the occluded background in transparent scenes.Unlike previous methods that assume a unimodal distribution along the disparity dimension and formulate the matching as a single-label regression problem, we propose a multi-label regression formulation to estimate multiple depth values at the same pixel in transparent scenes. To resolve the multi-label regression problem, we introduce a pixel-wise multivariate Gaussian representation, where the mean vector encodes multiple depth values at the same pixel, and the covariance matrix determines whether a multi-label representation is necessary for a given pixel. The representation is iteratively predicted within a GRU framework. In each iteration, we first predict the update step for the mean parameters and then use both the update step and the updated mean parameters to estimate the covariance matrix. We also synthesize a dataset containing 10 scenes and 89 objects to validate the performance of transparent scene depth estimation. The experiments show that our method greatly improves the performance on transparent surfaces while preserving the background information for scene reconstruction. Code is available at https://github.com/BFZD233/TranScene.
Diving into the Fusion of Monocular Priors for Generalized Stereo Matching
May 20, 2025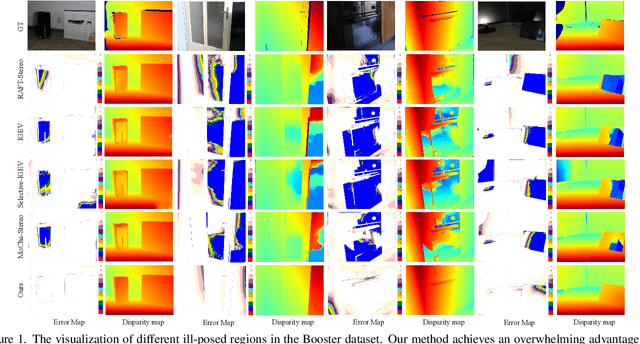
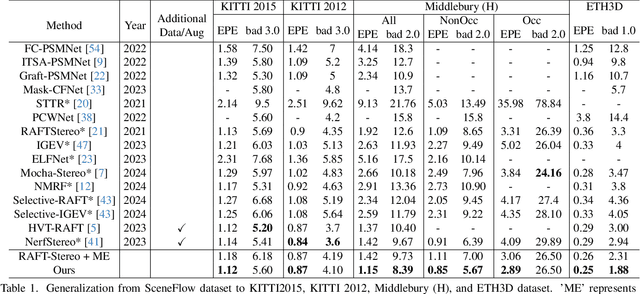
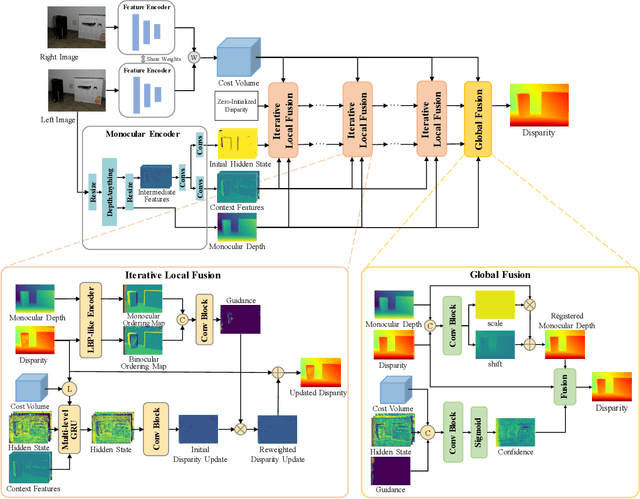
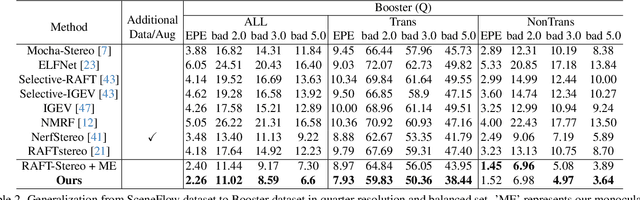
The matching formulation makes it naturally hard for the stereo matching to handle ill-posed regions like occlusions and non-Lambertian surfaces. Fusing monocular priors has been proven helpful for ill-posed matching, but the biased monocular prior learned from small stereo datasets constrains the generalization. Recently, stereo matching has progressed by leveraging the unbiased monocular prior from the vision foundation model (VFM) to improve the generalization in ill-posed regions. We dive into the fusion process and observe three main problems limiting the fusion of the VFM monocular prior. The first problem is the misalignment between affine-invariant relative monocular depth and absolute depth of disparity. Besides, when we use the monocular feature in an iterative update structure, the over-confidence in the disparity update leads to local optima results. A direct fusion of a monocular depth map could alleviate the local optima problem, but noisy disparity results computed at the first several iterations will misguide the fusion. In this paper, we propose a binary local ordering map to guide the fusion, which converts the depth map into a binary relative format, unifying the relative and absolute depth representation. The computed local ordering map is also used to re-weight the initial disparity update, resolving the local optima and noisy problem. In addition, we formulate the final direct fusion of monocular depth to the disparity as a registration problem, where a pixel-wise linear regression module can globally and adaptively align them. Our method fully exploits the monocular prior to support stereo matching results effectively and efficiently. We significantly improve the performance from the experiments when generalizing from SceneFlow to Middlebury and Booster datasets while barely reducing the efficiency.
3D Visual Illusion Depth Estimation
May 19, 20253D visual illusion is a perceptual phenomenon where a two-dimensional plane is manipulated to simulate three-dimensional spatial relationships, making a flat artwork or object look three-dimensional in the human visual system. In this paper, we reveal that the machine visual system is also seriously fooled by 3D visual illusions, including monocular and binocular depth estimation. In order to explore and analyze the impact of 3D visual illusion on depth estimation, we collect a large dataset containing almost 3k scenes and 200k images to train and evaluate SOTA monocular and binocular depth estimation methods. We also propose a robust depth estimation framework that uses common sense from a vision-language model to adaptively select reliable depth from binocular disparity and monocular depth. Experiments show that SOTA monocular, binocular, and multi-view depth estimation approaches are all fooled by various 3D visual illusions, while our method achieves SOTA performance.
Temporally Consistent Stereo Matching
Jul 16, 2024Stereo matching provides depth estimation from binocular images for downstream applications. These applications mostly take video streams as input and require temporally consistent depth maps. However, existing methods mainly focus on the estimation at the single-frame level. This commonly leads to temporally inconsistent results, especially in ill-posed regions. In this paper, we aim to leverage temporal information to improve the temporal consistency, accuracy, and efficiency of stereo matching. To achieve this, we formulate video stereo matching as a process of temporal disparity completion followed by continuous iterative refinements. Specifically, we first project the disparity of the previous timestamp to the current viewpoint, obtaining a semi-dense disparity map. Then, we complete this map through a disparity completion module to obtain a well-initialized disparity map. The state features from the current completion module and from the past refinement are fused together, providing a temporally coherent state for subsequent refinement. Based on this coherent state, we introduce a dual-space refinement module to iteratively refine the initialized result in both disparity and disparity gradient spaces, improving estimations in ill-posed regions. Extensive experiments demonstrate that our method effectively alleviates temporal inconsistency while enhancing both accuracy and efficiency.