 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Logical Anomaly Classification via Constraint Decomposition and Instruction Fine-Tuning
Feb 03, 2026Logical anomalies are violations of predefined constraints on object quantity, spatial layout, and compositional relationships in industrial images. While prior work largely treats anomaly detection as a binary decision, such formulations cannot indicate which logical rule is broken and therefore offer limited value for quality assurance. We introduce Logical Anomaly Classification (LAC), a task that unifies anomaly detection and fine-grained violation classification in a single inference step. To tackle LAC, we propose LogiCls, a vision-language framework that decomposes complex logical constraints into a sequence of verifiable subqueries. We further present a data-centric instruction synthesis pipeline that generates chain-of-thought (CoT) supervision for these subqueries, coupling precise grounding annotations with diverse image-text augmentations to adapt vision language models (VLMs) to logic-sensitive reasoning. Training is stabilized by a difficulty-aware resampling strategy that emphasizes challenging subqueries and long tail constraint types. Extensive experiments demonstrate that LogiCls delivers robust, interpretable, and accurate industrial logical anomaly classification, providing both the predicted violation categories and their evidence trails.
The Fourth Monocular Depth Estimation Challenge
Apr 24, 2025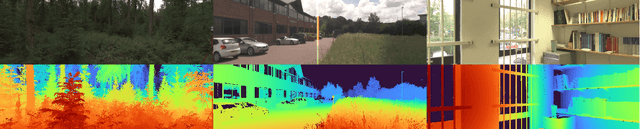
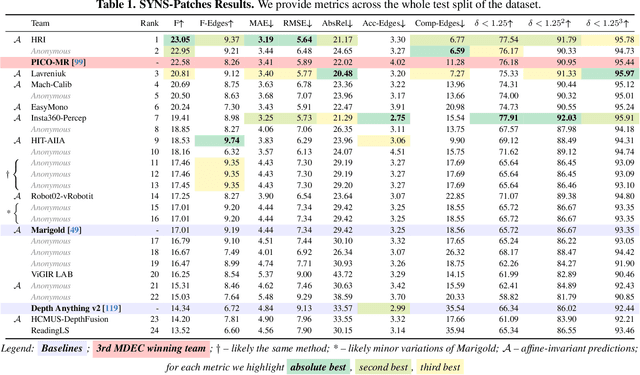
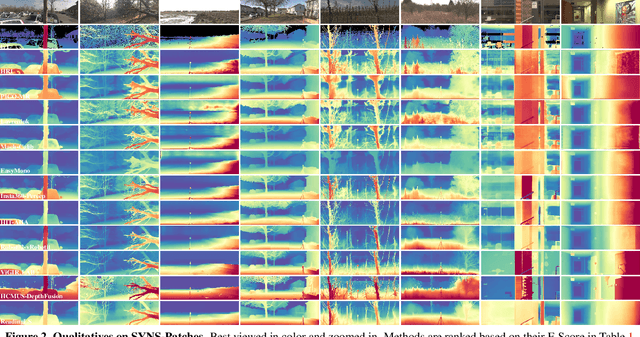
This paper presents the results of the fourth edition of the Monocular Depth Estimation Challenge (MDEC), which focuses on zero-shot generalization to the SYNS-Patches benchmark, a dataset featuring challenging environments in both natural and indoor settings. In this edition, we revised the evaluation protocol to use least-squares alignment with two degrees of freedom to support disparity and affine-invariant predictions. We also revised the baselines and included popular off-the-shelf methods: Depth Anything v2 and Marigold. The challenge received a total of 24 submissions that outperformed the baselines on the test set; 10 of these included a report describing their approach, with most leading methods relying on affine-invariant predictions. The challenge winners improved the 3D F-Score over the previous edition's best result, raising it from 22.58% to 23.05%.