 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSunnyParking: Multi-Shot Trajectory Generation and Motion State Awareness for Human-like Parking
Feb 25, 2026Autonomous parking fundamentally differs from on-road driving due to its frequent direction changes and complex maneuvering requirements. However, existing End-to-End (E2E) planning methods often simplify the parking task into a geometric path regression problem, neglecting explicit modeling of the vehicle's kinematic state. This "dimensionality deficiency" easily leads to physically infeasible trajectories and deviates from real human driving behavior, particularly at critical gear-shift points in multi-shot parking scenarios. In this paper, we propose SunnyParking, a novel dual-branch E2E architecture that achieves motion state awareness by jointly predicting spatial trajectories and discrete motion state sequences (e.g., forward/reverse). Additionally, we introduce a Fourier feature-based representation of target parking slots to overcome the resolution limitations of traditional bird's-eye view (BEV) approaches, enabling high-precision target interactions. Experimental results demonstrate that our framework generates more robust and human-like trajectories in complex multi-shot parking scenarios, while significantly improving gear-shift point localization accuracy compared to state-of-the-art methods. We open-source a new parking dataset of the CARLA simulator, specifically designed to evaluate full prediction capabilities under complex maneuvers.
Learning based Predictive Error Estimation and Compensator Design for Autonomous Vehicle Path Tracking
Jul 18, 2020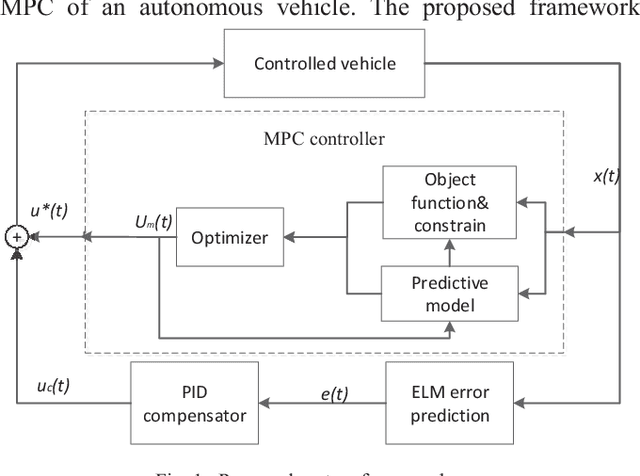
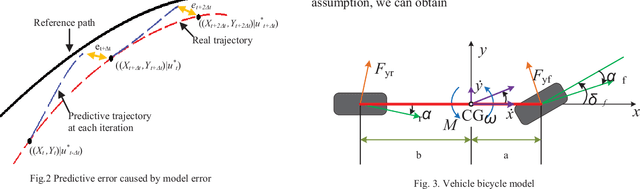
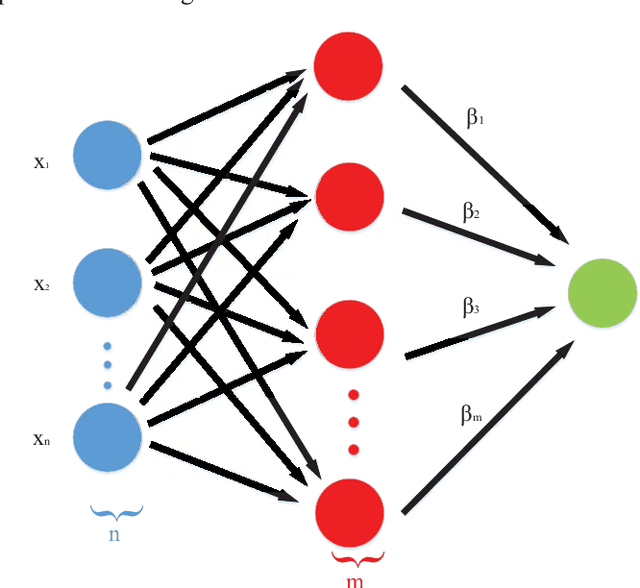
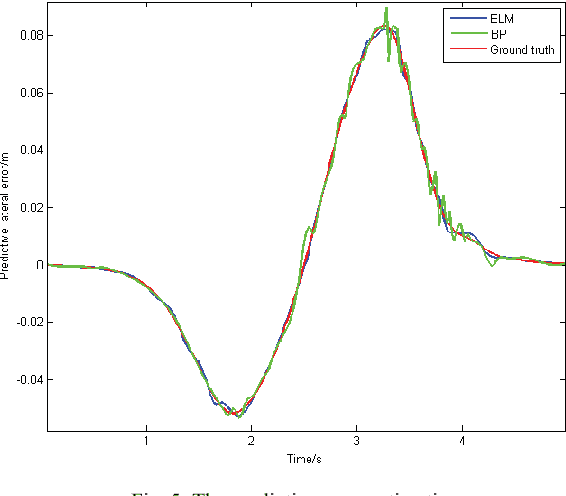
Model predictive control (MPC) is widely used for path tracking of autonomous vehicles due to its ability to handle various types of constraints. However, a considerable predictive error exists because of the error of mathematics model or the model linearization. In this paper, we propose a framework combining the MPC with a learning-based error estimator and a feedforward compensator to improve the path tracking accuracy. An extreme learning machine is implemented to estimate the model based predictive error from vehicle state feedback information. Offline training data is collected from a vehicle controlled by a model-defective regular MPC for path tracking in several working conditions, respectively. The data include vehicle state and the spatial error between the current actual position and the corresponding predictive position. According to the estimated predictive error, we then design a PID-based feedforward compensator. Simulation results via Carsim show the estimation accuracy of the predictive error and the effectiveness of the proposed framework for path tracking of an autonomous vehicle.