 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHadamard Encoded Row Column Ultrasonic Expansive Scanning (HERCULES) with Bias-Switchable Row-Column Arrays
Jun 13, 2025Top-Orthogonal-to-Bottom-Electrode (TOBE) arrays, also known as bias-switchable row-column arrays (RCAs), allow for imaging techniques otherwise impossible for non-bias-switachable RCAs. Hadamard Encoded Row Column Ultrasonic Expansive Scanning (HERCULES) is a novel imaging technique that allows for expansive 3D scanning by transmitting plane or cylindrical wavefronts and receiving using Hadamard-Encoded-Read-Out (HERO) to perform beamforming on what is effectively a full 2D synthetic receive aperture. This allows imaging beyond the shadow of the aperture of the RCA array, potentially allows for whole organ imaging and 3D visualization of tissue morphology. It additionally enables view large volumes through limited windows. In this work we demonstrated with simulation that we are able to image at comparable resolution to existing RCA imaging methods at hundreds of frames per second. We validated these simulations by demonstrating an experimental implementation of HERCULES using a custom fabricated TOBE array, custom biasing electronics, and a research ultrasound system. Furthermore, we assess our imaging capabilities by imaging a commercial phantom, and comparing our results to those taken with traditional RCA imaging methods. Finally, we verified our ability to image real tissue by imaging a xenograft mouse model.
Bias-Switchable Row-Column Array Imaging using Fast Orthogonal Row-Column Electronic Scanning (FORCES) Compared with Conventional Row-Column Array Imaging
Jun 12, 2025Row-Column Arrays (RCAs) offer an attractive alternative to fully wired 2D-arrays for 3D-ultrasound, due to their greatly simplified wiring. However, conventional RCAs face challenges related to their long elements. These include an inability to image beyond the shadow of the aperture and an inability to focus in both transmit and receive for desired scan planes. To address these limitations, we recently developed bias-switchable RCAs, also known as Top Orthogonal to Bottom Electrode (TOBE) arrays. These arrays provide novel opportunities to read out from every element of the array and achieve high-quality images. While TOBE arrays and their associated imaging schemes have shown promise, they have not yet been directly compared experimentally to conventional RCA imaging techniques. This study aims to provide such a comparison, demonstrating superior B-scan and volumetric images from two electrostrictive relaxor TOBE arrays, using a method called Fast Orthogonal Row-Column Electronic scanning (FORCES), compared to conventional RCA imaging schemes, including Tilted Plane Wave (TPW) compounding and Virtual Line Source (VLS) imaging. The study quantifies resolution and Generalized Contrast to Noise Ratio (gCNR) in phantoms, and also demonstrates volumetric acquisitions in phantom and animal models.
FACT: A Full-body Ad-hoc Collaboration Testbed for Modeling Complex Teamwork
Jun 07, 2021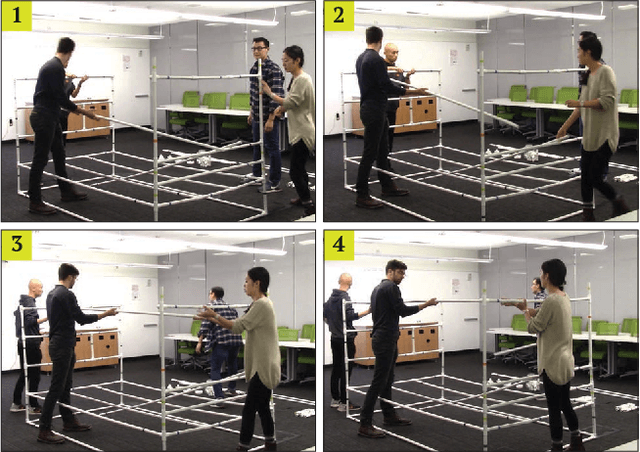
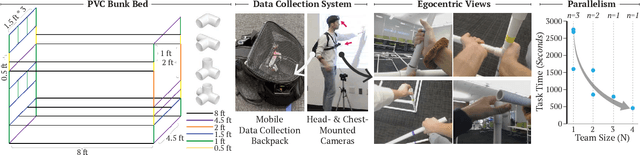
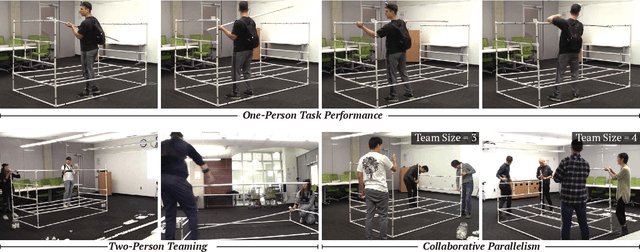
Robots are envisioned to work alongside humans in applications ranging from in-home assistance to collaborative manufacturing. Research on human-robot collaboration (HRC) has helped develop various aspects of social intelligence necessary for robots to participate in effective, fluid collaborations with humans. However, HRC research has focused on dyadic, structured, and minimal collaborations between humans and robots that may not fully represent the large scale and emergent nature of more complex, unstructured collaborative activities. Thus, there remains a need for shared testbeds, datasets, and evaluation metrics that researchers can use to better model natural, ad-hoc human collaborative behaviors and develop robot capabilities intended for large scale emergent collaborations. We present one such shared resource - FACT (Full-body Ad-hoc Collaboration Testbed), an openly accessible testbed for researchers to obtain an expansive view of the individual and team-based behaviors involved in complex, co-located teamwork. We detail observations from a preliminary exploration with teams of various sizes and discuss potential research questions that may be investigated using the testbed. Our goal is for FACT to be an initial resource that supports a more holistic investigation of human-robot collaboration.