 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Dependent Hidden Markov Model with Off-Road State Determination and Real-Time Viterbi Algorithm for Lane Determination in Autonomous Vehicles
May 07, 2025Lane determination and lane sequence determination are important components for many Connected and Automated Vehicle (CAV) applications. Lane determination has been solved using Hidden Markov Model (HMM) among other methods. The existing HMM literature for lane sequence determination uses empirical definitions with user-modified parameters to calculate HMM probabilities. The probability definitions in the literature can cause breaks in the HMM due to the inability to directly calculate probabilities of off-road positions, requiring post-processing of data. This paper develops a time-varying HMM using the physical properties of the roadway and vehicle, and the stochastic properties of the sensors. This approach yields emission and transition probability models conditioned on the sensor data without parameter tuning. It also accounts for the probability that the vehicle is not in any roadway lane (e.g., on the shoulder or making a U-turn), which eliminates the need for post-processing to deal with breaks in the HMM processing. This approach requires adapting the Viterbi algorithm and the HMM to be conditioned on the sensor data, which are then used to generate the most-likely sequence of lanes the vehicle has traveled. The proposed approach achieves an average accuracy of 95.9%. Compared to the existing literature, this provides an average increase of 2.25% by implementing the proposed transition probability and an average increase of 5.1% by implementing both the proposed transition and emission probabilities.
Optimization-Based Outlier Accommodation for Tightly Coupled RTK-Aided Inertial Navigation Systems in Urban Environments
Jul 18, 2024



Global Navigation Satellite Systems (GNSS) aided Inertial Navigation System (INS) is a fundamental approach for attaining continuously available absolute vehicle position and full state estimates at high bandwidth. For transportation applications, stated accuracy specifications must be achieved, unless the navigation system can detect when it is violated. In urban environments, GNSS measurements are susceptible to outliers, which motivates the important problem of accommodating outliers while either achieving a performance specification or communicating that it is not feasible. Risk-Averse Performance-Specified (RAPS) is designed to optimally select measurements to address this problem. Existing RAPS approaches lack a method applicable to carrier phase measurements, which have the benefit of measurement errors at the centimeter level along with the challenge of being biased by integer ambiguities. This paper proposes a RAPS framework that combines Real-time Kinematic (RTK) GNSS in a tightly coupled INS for urban navigation applications. Experimental results demonstrate the effectiveness of this RAPS-INS-RTK framework, achieving 84.05% and 89.84% of horizontal and vertical errors less than 1.5 meters and 3 meters, respectively, using a deep-urban dataset. This performance not only surpasses the Society of Automotive Engineers (SAE) requirements, but also shows a 10% improvement compared to traditional methods.
Challenges in Partially-Automated Roadway Feature Mapping Using Mobile Laser Scanning and Vehicle Trajectory Data
Feb 09, 2019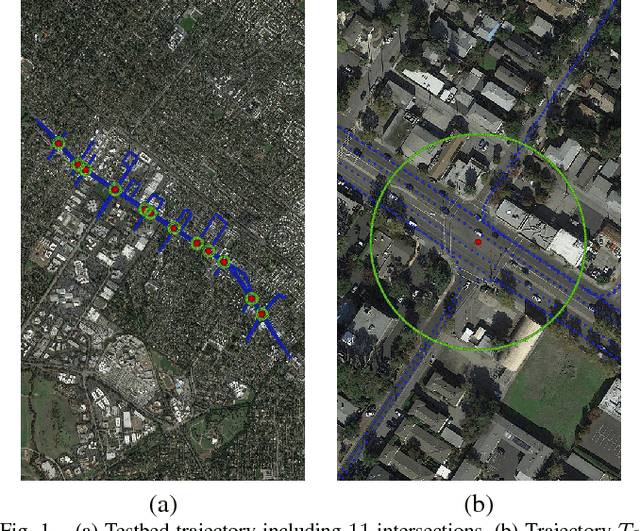
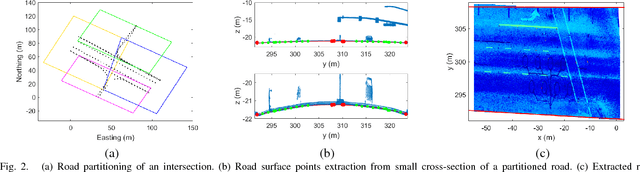
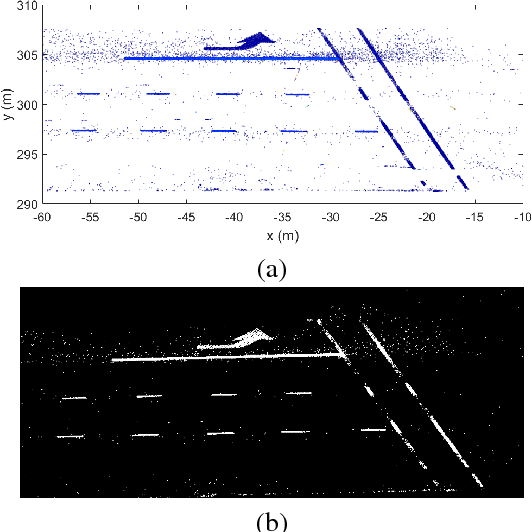
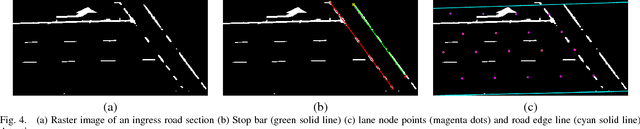
Connected vehicle and driver's assistance applications are greatly facilitated by Enhanced Digital Maps (EDMs) that represent roadway features (e.g., lane edges or centerlines, stop bars). Due to the large number of signalized intersections and miles of roadway, manual development of EDMs on a global basis is not feasible. Mobile Terrestrial Laser Scanning (MTLS) is the preferred data acquisition method to provide data for automated EDM development. Such systems provide an MTLS trajectory and a point cloud for the roadway environment. The challenge is to automatically convert these data into an EDM. This article presents a new processing and feature extraction method, experimental demonstration providing SAE-J2735 map messages for eleven example intersections, and a discussion of the results that points out remaining challenges and suggests directions for future research.