 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Operators for Design-Space Surrogate Modeling of Tendon-Actuated Continuum Robots
May 18, 2026Continuum robots enable dexterous manipulation in constrained environments, but require accurate and efficient models for real-time manipulation and control. Traditional physics-based models can be computationally expensive and may suffer from inaccuracies due to unmodeled effects, while current learning-based methods often generalize poorly beyond the specific robot on which they are trained. We present a formulation of surrogate modeling for tendon-driven continuum robots as an operator learning problem that maps robot design parameters and tendon actuation inputs to resulting configurations. This formulation enables a single trained model to generalize across a large class of robot designs. We develop four novel neural operator architectures--two based on Deep Operator Networks (DeepONets) and two based on Fourier Neural Operators (FNOs)--and train them on simulation data to predict robot configurations. All architectures achieve good accuracy while allowing for fast and accurate generalization across designs. Our results demonstrate that operator learning provides an effective and generalizable surrogate for continuum robot mechanics in the design space, enabling fast modeling for control, planning, and design optimization in surgical and industrial applications.
Fast Continuum Robot Shape and External Load State Estimation on SE(3)
Jan 08, 2026Previous on-manifold approaches to continuum robot state estimation have typically adopted simplified Cosserat rod models, which cannot directly account for actuation inputs or external loads. We introduce a general framework that incorporates uncertainty models for actuation (e.g., tendon tensions), applied forces and moments, process noise, boundary conditions, and arbitrary backbone measurements. By adding temporal priors across time steps, our method additionally performs joint estimation in both the spatial (arclength) and temporal domains, enabling full \textit{spacetime} state estimation. Discretizing the arclength domain yields a factor graph representation of the continuum robot model, which can be exploited for fast batch sparse nonlinear optimization in the style of SLAM. The framework is general and applies to a broad class of continuum robots; as illustrative cases, we show (i) tendon-driven robots in simulation, where we demonstrate real-time kinematics with uncertainty, tip force sensing from position feedback, and distributed load estimation from backbone strain, and (ii) a surgical concentric tube robot in experiment, where we validate accurate kinematics and tip force estimation, highlighting potential for surgical palpation.
DefFusionNet: Learning Multimodal Goal Shapes for Deformable Object Manipulation via a Diffusion-based Probabilistic Model
Jun 23, 2025Deformable object manipulation is critical to many real-world robotic applications, ranging from surgical robotics and soft material handling in manufacturing to household tasks like laundry folding. At the core of this important robotic field is shape servoing, a task focused on controlling deformable objects into desired shapes. The shape servoing formulation requires the specification of a goal shape. However, most prior works in shape servoing rely on impractical goal shape acquisition methods, such as laborious domain-knowledge engineering or manual manipulation. DefGoalNet previously posed the current state-of-the-art solution to this problem, which learns deformable object goal shapes directly from a small number of human demonstrations. However, it significantly struggles in multi-modal settings, where multiple distinct goal shapes can all lead to successful task completion. As a deterministic model, DefGoalNet collapses these possibilities into a single averaged solution, often resulting in an unusable goal. In this paper, we address this problem by developing DefFusionNet, a novel neural network that leverages the diffusion probabilistic model to learn a distribution over all valid goal shapes rather than predicting a single deterministic outcome. This enables the generation of diverse goal shapes and avoids the averaging artifacts. We demonstrate our method's effectiveness on robotic tasks inspired by both manufacturing and surgical applications, both in simulation and on a physical robot. Our work is the first generative model capable of producing a diverse, multi-modal set of deformable object goals for real-world robotic applications.
A Recurrent Neural Network Approach to Roll Estimation for Needle Steering
Jan 13, 2021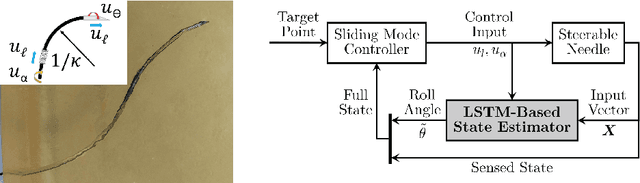
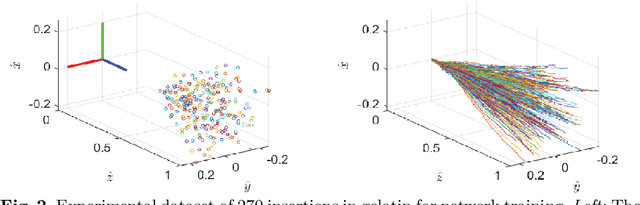
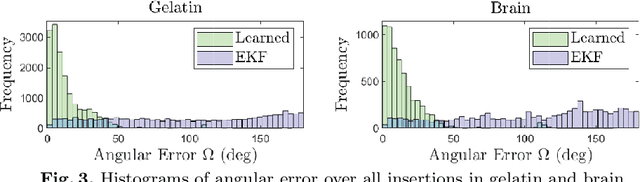
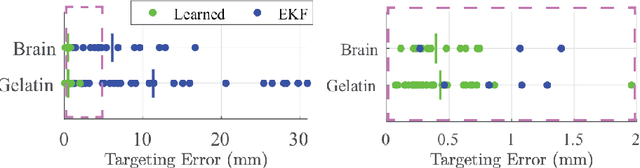
Steerable needles are a promising technology for delivering targeted therapies in the body in a minimally-invasive fashion, as they can curve around anatomical obstacles and hone in on anatomical targets. In order to accurately steer them, controllers must have full knowledge of the needle tip's orientation. However, current sensors either do not provide full orientation information or interfere with the needle's ability to deliver therapy. Further, torsional dynamics can vary and depend on many parameters making steerable needles difficult to accurately model, limiting the effectiveness of traditional observer methods. To overcome these limitations, we propose a model-free, learned-method that leverages LSTM neural networks to estimate the needle tip's orientation online. We validate our method by integrating it into a sliding-mode controller and steering the needle to targets in gelatin and ex vivo ovine brain tissue. We compare our method's performance against an Extended Kalman Filter, a model-based observer, achieving significantly lower targeting errors.