 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Planning and Policy Shaping Shared Autonomy for Articulated Robots
Jul 04, 2023



In this work, we propose a novel shared autonomy framework to operate articulated robots. We provide strategies to design both the task-oriented hierarchical planning and policy shaping algorithms for efficient human-robot interactions in context-aware operation of articulated robots. Our framework for interplay between the human and the autonomy, as the participating agents in the system, is particularly influenced by the ideas from multi-agent systems, game theory, and theory of mind for a sliding level of autonomy. We formulate the sequential hierarchical human-in-the-loop decision making process by extending MDPs and Options framework to shared autonomy, and make use of deep RL techniques to train an uncertainty-aware shared autonomy policy. To fine-tune the formulation to a human, we use history of the system states, human actions, and their error with respect to a surrogate optimal model to encode human's internal state embeddings, beyond the designed values, by using conditional VAEs. We showcase the effectiveness of our formulation for different human skill levels and degrees of cooperativeness by using a case study of a feller-buncher machine in the challenging tasks of timber harvesting. Our framework is successful in providing a sliding level of autonomy from fully autonomous to fully manual, and is particularly successful in handling a noisy non-cooperative human agent in the loop. The proposed framework advances the state-of-the-art in shared autonomy for operating articulated robots, but can also be applied to other domains where autonomous operation is the ultimate goal.
Stability Constrained Mobile Manipulation Planning on Rough Terrain
May 10, 2021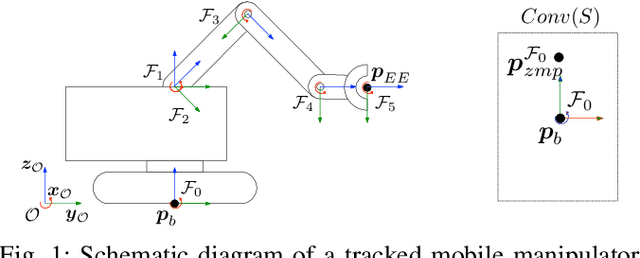
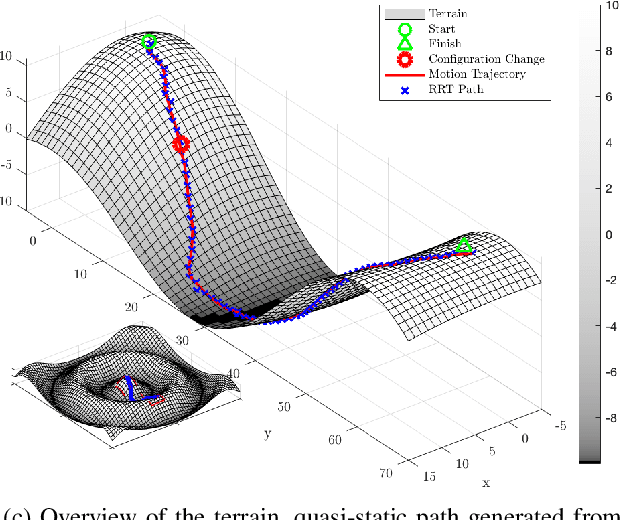
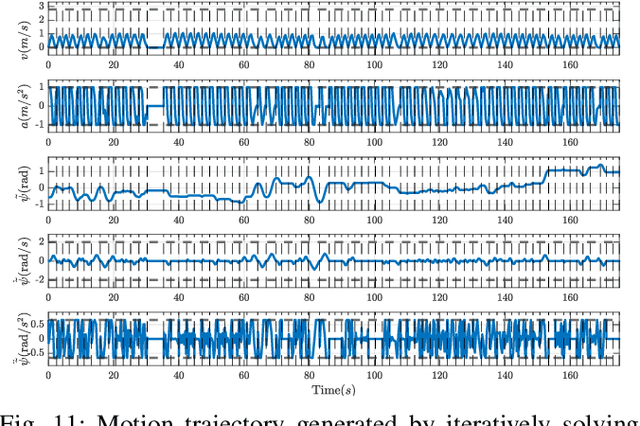
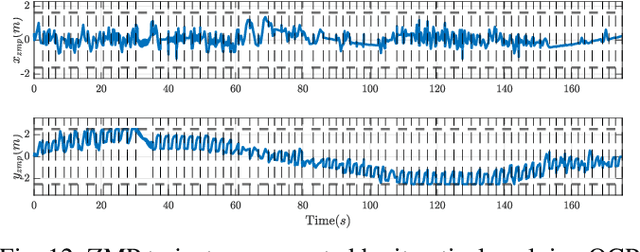
This paper presents a framework that allows online dynamic-stability-constrained optimal trajectory planning of a mobile manipulator robot working on rough terrain. First, the kinematics model of a mobile manipulator robot, and the Zero Moment Point (ZMP) stability measure are presented as theoretical background. Then, a sampling-based quasi-static planning algorithm modified for stability guarantee and traction optimization in continuous dynamic motion is presented along with a mathematical proof. The robot's quasi-static path is then used as an initial guess to warm-start a nonlinear optimal control solver which may otherwise have difficulties finding a solution to the stability-constrained formulation efficiently. The performance and computational efficiency of the framework are demonstrated through an application to a simulated timber harvesting mobile manipulator machine working on varying terrain. The results demonstrate feasibility of online trajectory planning on varying terrain while satisfying the dynamic stability constraint.
Learning the Latent Space of Robot Dynamics for Cutting Interaction Inference
Jul 22, 2020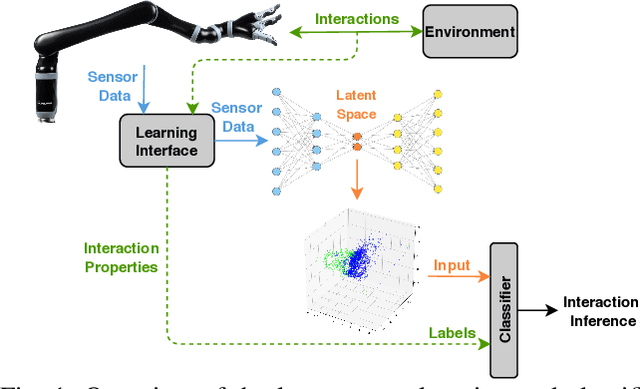
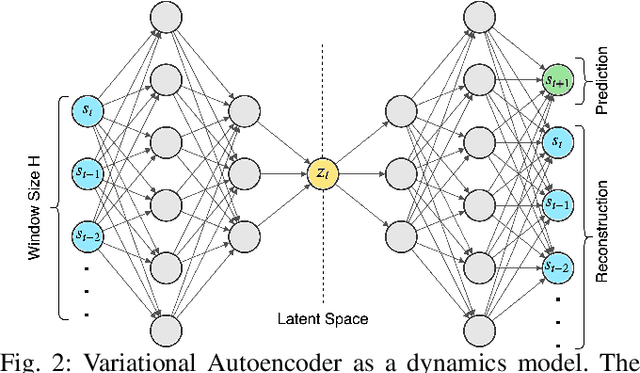
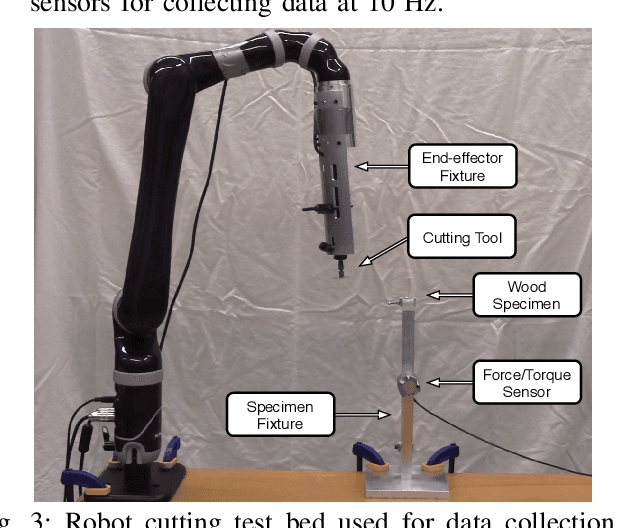
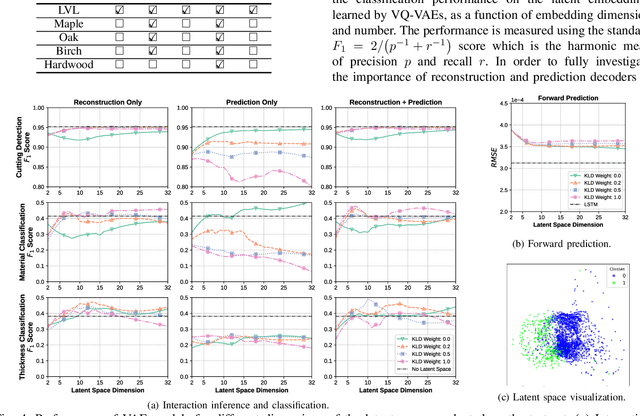
Utilization of latent space to capture a lower-dimensional representation of a complex dynamics model is explored in this work. The targeted application is of a robotic manipulator executing a complex environment interaction task, in particular, cutting a wooden object. We train two flavours of Variational Autoencoders---standard and Vector-Quantised---to learn the latent space which is then used to infer certain properties of the cutting operation, such as whether the robot is cutting or not, as well as, material and geometry of the object being cut. The two VAE models are evaluated with reconstruction, prediction and a combined reconstruction/prediction decoders. The results demonstrate the expressiveness of the latent space for robotic interaction inference and the competitive prediction performance against recurrent neural networks.
Cascaded Gaussian Processes for Data-efficient Robot Dynamics Learning
Oct 05, 2019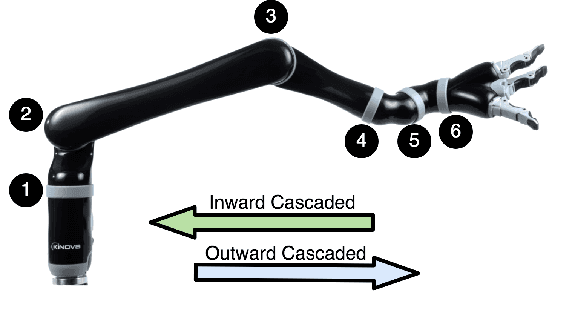
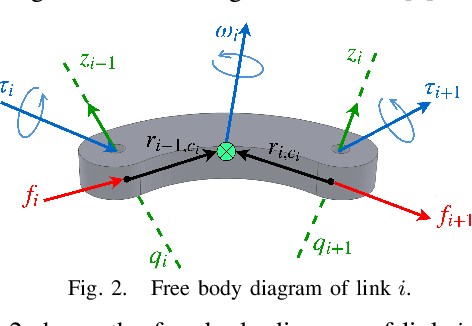
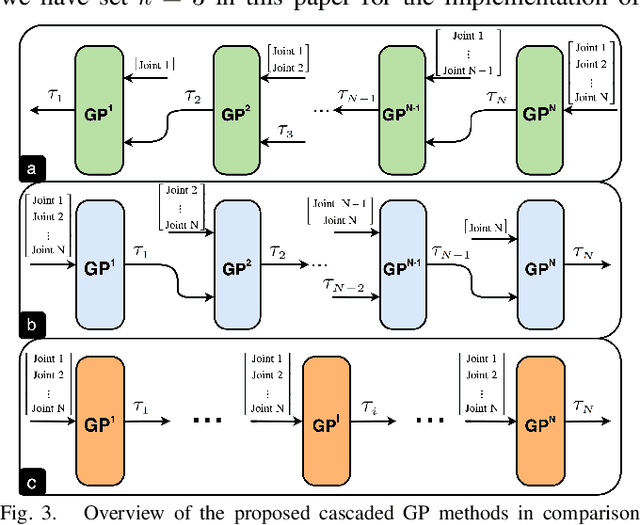
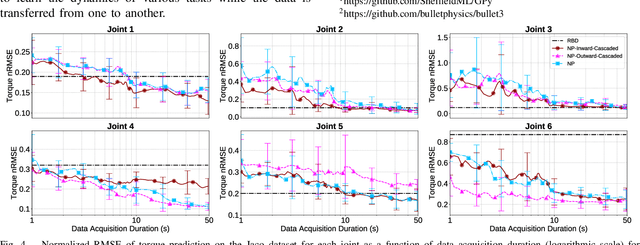
Motivated by the recursive Newton-Euler formulation, we propose a novel cascaded Gaussian process learning framework for the inverse dynamics of robot manipulators. This approach leads to a significant dimensionality reduction which in turn results in better learning and data efficiency. We explore two formulations for the cascading: the inward and outward, both along the manipulator chain topology. The learned modeling is tested in conjunction with the classical inverse dynamics model (semi-parametric) and on its own (non-parametric) in the context of feed-forward control of the arm. Experimental results are obtained with Jaco 2 six-DOF and SARCOS seven-DOF manipulators for randomly defined sinusoidal motions of the joints in order to evaluate the performance of cascading against the standard GP learning. In addition, experiments are conducted using Jaco 2 on a task emulating a pouring maneuver. Results indicate a consistent improvement in learning speed with the inward cascaded GP model and an overall improvement in data efficiency and generalization.