 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Knowledge to Action: Outcomes of the 2025 Large Language Model (LLM) Hackathon for Applications in Materials Science and Chemistry
May 04, 2026Large language models (LLMs) are rapidly changing how researchers in materials science and chemistry discover, organize, and act on scientific knowledge. This paper analyzes a broad set of community-developed LLM applications in an effort to identify emerging patterns in how these systems can be used across the scientific research lifecycle. We organize the projects into two complementary categories: Knowledge Infrastructure, systems that structure, retrieve, synthesize, and validate scientific information; and Action Systems, systems that execute, coordinate, or automate scientific work across computational and experimental environments. The submissions reveal a shift from single-purpose LLM tools toward integrated, multi-agent workflows that combine retrieval, reasoning, tool use, and domain-specific validation. Prominent themes include retrieval-augmented generation as grounding infrastructure, persistent structured knowledge representations, multimodal and multilingual scientific inputs, and early progress toward laboratory-integrated closed-loop systems. Together, these results suggest that LLMs are evolving from general-purpose assistants into composable infrastructure for scientific reasoning and action. This work provides a community snapshot of that transition and a practical taxonomy for understanding emerging LLM-enabled workflows in materials science and chemistry.
Guiding Generative Models to Uncover Diverse and Novel Crystals via Reinforcement Learning
Nov 10, 2025Discovering functional crystalline materials entails navigating an immense combinatorial design space. While recent advances in generative artificial intelligence have enabled the sampling of chemically plausible compositions and structures, a fundamental challenge remains: the objective misalignment between likelihood-based sampling in generative modelling and targeted focus on underexplored regions where novel compounds reside. Here, we introduce a reinforcement learning framework that guides latent denoising diffusion models toward diverse and novel, yet thermodynamically viable crystalline compounds. Our approach integrates group relative policy optimisation with verifiable, multi-objective rewards that jointly balance creativity, stability, and diversity. Beyond de novo generation, we demonstrate enhanced property-guided design that preserves chemical validity, while targeting desired functional properties. This approach establishes a modular foundation for controllable AI-driven inverse design that addresses the novelty-validity trade-off across scientific discovery applications of generative models.
Continuous Uniqueness and Novelty Metrics for Generative Modeling of Inorganic Crystals
Oct 14, 2025To address pressing scientific challenges such as climate change, increasingly sophisticated generative artificial intelligence models are being developed that can efficiently sample the large chemical space of possible functional materials. These models can quickly sample new chemical compositions paired with crystal structures. They are typically evaluated using uniqueness and novelty metrics, which depend on a chosen crystal distance function. However, the most prevalent distance function has four limitations: it fails to quantify the degree of similarity between compounds, cannot distinguish compositional difference and structural difference, lacks Lipschitz continuity against shifts in atomic coordinates, and results in a uniqueness metric that is not invariant against the permutation of generated samples. In this work, we propose using two continuous distance functions to evaluate uniqueness and novelty, which theoretically overcome these limitations. Our experiments show that these distances reveal insights missed by traditional distance functions, providing a more reliable basis for evaluating and comparing generative models for inorganic crystals.
HandNeRF: Learning to Reconstruct Hand-Object Interaction Scene from a Single RGB Image
Sep 14, 2023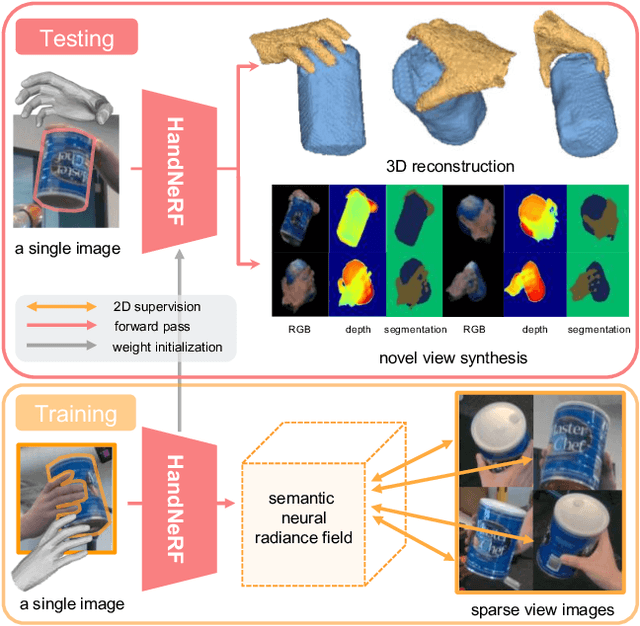

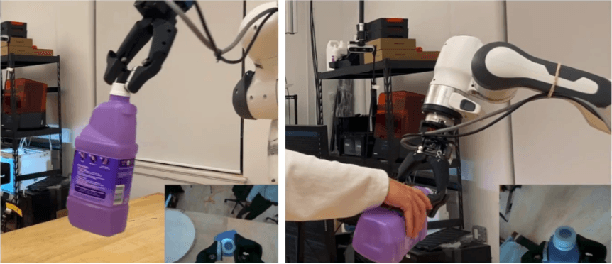

This paper presents a method to learn hand-object interaction prior for reconstructing a 3D hand-object scene from a single RGB image. The inference as well as training-data generation for 3D hand-object scene reconstruction is challenging due to the depth ambiguity of a single image and occlusions by the hand and object. We turn this challenge into an opportunity by utilizing the hand shape to constrain the possible relative configuration of the hand and object geometry. We design a generalizable implicit function, HandNeRF, that explicitly encodes the correlation of the 3D hand shape features and 2D object features to predict the hand and object scene geometry. With experiments on real-world datasets, we show that HandNeRF is able to reconstruct hand-object scenes of novel grasp configurations more accurately than comparable methods. Moreover, we demonstrate that object reconstruction from HandNeRF ensures more accurate execution of a downstream task, such as grasping for robotic hand-over.