 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePigeonholing: Bad prompts hurt models to collapse and make mistakes
Jun 23, 2026While in-context learning is generally shown to be effective in Large Language Models (LLMs), bad contexts can cause performance degradation and mode collapse, a phenomenon we call "pigeonholing." **Unintentionally bad** contexts can happen without malicious jailbreaking intents: For example, a user asks the model to justify an incorrect math theorem or fails to correct the model's buggy code. Specifically, we investigate ``pigeonholing" in two scenarios: (1) when the user suggests a solution, and (2) when the conversation context includes the assistant's previous (incorrect) responses. Our experiments across 10 verifiable and open-ended tasks with 10 different models show that pigeonholing manifests in several ways: (1) repeating the incorrect answers from context (leading to 38-40% performance drop), (2) converging on a narrow set of answers in coding and text generation without exploring alternatives, and (3) flipping stance on controversial topics to align with the user or the assistant's previous claims. We find that pigeonholing worsens almost monotonically with the number of conversation turns (performance drops by additional 14+% as repeated mistakes increase from 1 to 5), and pigeonholing-induced mode collapse can happen even when the provided example is correct. As a step toward mitigation, we propose RLVR with synthetic errors which improves models by 43-60% under bad contexts compared to vanilla RLVR baselines.
Mitigating LLM biases toward spurious social contexts using direct preference optimization
Apr 02, 2026LLMs are increasingly used for high-stakes decision-making, yet their sensitivity to spurious contextual information can introduce harmful biases. This is a critical concern when models are deployed for tasks like evaluating teachers' instructional quality, where biased assessment can affect teachers' professional development and career trajectories. We investigate model robustness to spurious social contexts using the largest publicly available dataset of U.S. classroom transcripts (NCTE) paired with expert rubric scores. Evaluating seven frontier and open-weight models across seven categories of spurious contexts -- including teacher experience, education level, demographic identity, and sycophancy-inducing framings -- we find that irrelevant contextual information can shift model predictions by up to 1.48 points on a 7-point scale, with larger models sometimes exhibiting greater sensitivity despite higher predictive accuracy. Mitigations using prompts and standard direct preference optimization (DPO) prove largely insufficient. We propose **Debiasing-DPO**,, a self-supervised training method that pairs neutral reasoning generated from the query alone, with the model's biased reasoning generated with both the query and additional spurious context. We further combine this objective with supervised fine-tuning on ground-truth labels to prevent losses in predictive accuracy. Applied to Llama 3B \& 8B and Qwen 3B \& 7B Instruct models, Debiasing-DPO reduces bias by 84\% and improves predictive accuracy by 52\% on average. Our findings from the educational case study highlight that robustness to spurious context is not a natural byproduct of model scaling and that our proposed method can yield substantial gains in both accuracy and robustness for prompt-based prediction tasks.
Netflix Artwork Personalization via LLM Post-training
Jan 06, 2026Large language models (LLMs) have demonstrated success in various applications of user recommendation and personalization across e-commerce and entertainment. On many entertainment platforms such as Netflix, users typically interact with a wide range of titles, each represented by an artwork. Since users have diverse preferences, an artwork that appeals to one type of user may not resonate with another with different preferences. Given this user heterogeneity, our work explores the novel problem of personalized artwork recommendations according to diverse user preferences. Similar to the multi-dimensional nature of users' tastes, titles contain different themes and tones that may appeal to different viewers. For example, the same title might feature both heartfelt family drama and intense action scenes. Users who prefer romantic content may like the artwork emphasizing emotional warmth between the characters, while those who prefer action thrillers may find high-intensity action scenes more intriguing. Rather than a one-size-fits-all approach, we conduct post-training of pre-trained LLMs to make personalized artwork recommendations, selecting the most preferred visual representation of a title for each user and thereby improving user satisfaction and engagement. Our experimental results with Llama 3.1 8B models (trained on a dataset of 110K data points and evaluated on 5K held-out user-title pairs) show that the post-trained LLMs achieve 3-5\% improvements over the Netflix production model, suggesting a promising direction for granular personalized recommendations using LLMs.
Learning Pluralistic User Preferences through Reinforcement Learning Fine-tuned Summaries
Jul 17, 2025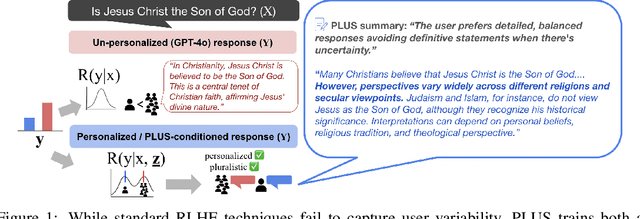



As everyday use cases of large language model (LLM) AI assistants have expanded, it is becoming increasingly important to personalize responses to align to different users' preferences and goals. While reinforcement learning from human feedback (RLHF) is effective at improving LLMs to be generally more helpful and fluent, it does not account for variability across users, as it models the entire user population with a single reward model. We present a novel framework, Preference Learning Using Summarization (PLUS), that learns text-based summaries of each user's preferences, characteristics, and past conversations. These summaries condition the reward model, enabling it to make personalized predictions about the types of responses valued by each user. We train the user-summarization model with reinforcement learning, and update the reward model simultaneously, creating an online co-adaptation loop. We show that in contrast with prior personalized RLHF techniques or with in-context learning of user information, summaries produced by PLUS capture meaningful aspects of a user's preferences. Across different pluralistic user datasets, we show that our method is robust to new users and diverse conversation topics. Additionally, we demonstrate that the textual summaries generated about users can be transferred for zero-shot personalization of stronger, proprietary models like GPT-4. The resulting user summaries are not only concise and portable, they are easy for users to interpret and modify, allowing for more transparency and user control in LLM alignment.
Predicting Long Term Sequential Policy Value Using Softer Surrogates
Dec 30, 2024Performing policy evaluation in education, healthcare and online commerce can be challenging, because it can require waiting substantial amounts of time to observe outcomes over the desired horizon of interest. While offline evaluation methods can be used to estimate the performance of a new decision policy from historical data in some cases, such methods struggle when the new policy involves novel actions or is being run in a new decision process with potentially different dynamics. Here we consider how to estimate the full-horizon value of a new decision policy using only short-horizon data from the new policy, and historical full-horizon data from a different behavior policy. We introduce two new estimators for this setting, including a doubly robust estimator, and provide formal analysis of their properties. Our empirical results on two realistic simulators, of HIV treatment and sepsis treatment, show that our methods can often provide informative estimates of a new decision policy ten times faster than waiting for the full horizon, highlighting that it may be possible to quickly identify if a new decision policy, involving new actions, is better or worse than existing past policies.