 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Action Proposal Generation with Background Constraint
Dec 15, 2021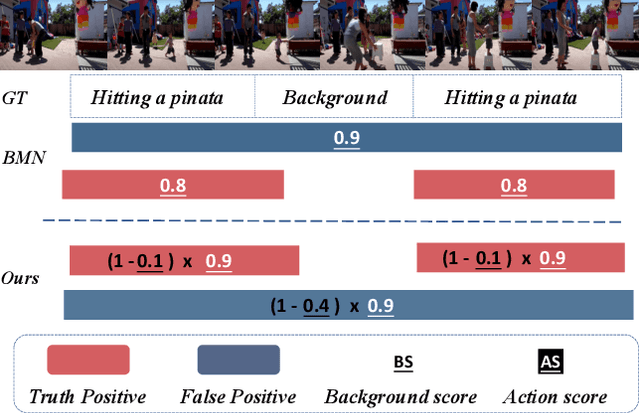
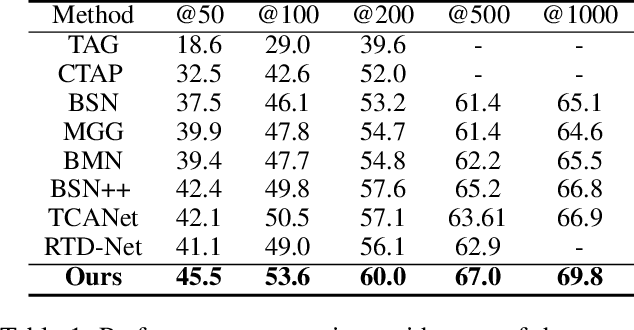
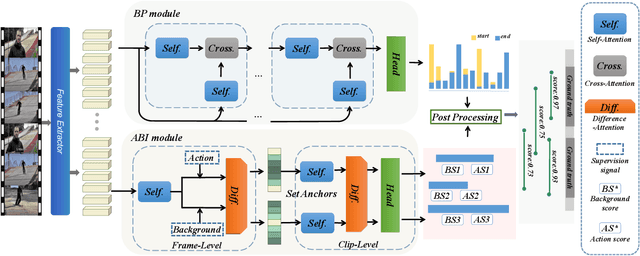
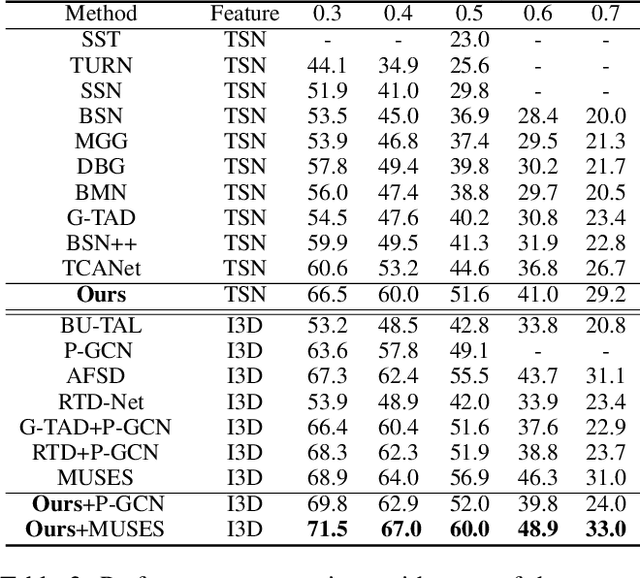
Temporal action proposal generation (TAPG) is a challenging task that aims to locate action instances in untrimmed videos with temporal boundaries. To evaluate the confidence of proposals, the existing works typically predict action score of proposals that are supervised by the temporal Intersection-over-Union (tIoU) between proposal and the ground-truth. In this paper, we innovatively propose a general auxiliary Background Constraint idea to further suppress low-quality proposals, by utilizing the background prediction score to restrict the confidence of proposals. In this way, the Background Constraint concept can be easily plug-and-played into existing TAPG methods (e.g., BMN, GTAD). From this perspective, we propose the Background Constraint Network (BCNet) to further take advantage of the rich information of action and background. Specifically, we introduce an Action-Background Interaction module for reliable confidence evaluation, which models the inconsistency between action and background by attention mechanisms at the frame and clip levels. Extensive experiments are conducted on two popular benchmarks, i.e., ActivityNet-1.3 and THUMOS14. The results demonstrate that our method outperforms state-of-the-art methods. Equipped with the existing action classifier, our method also achieves remarkable performance on the temporal action localization task.
Temporal Action Proposal Generation with Transformers
May 25, 2021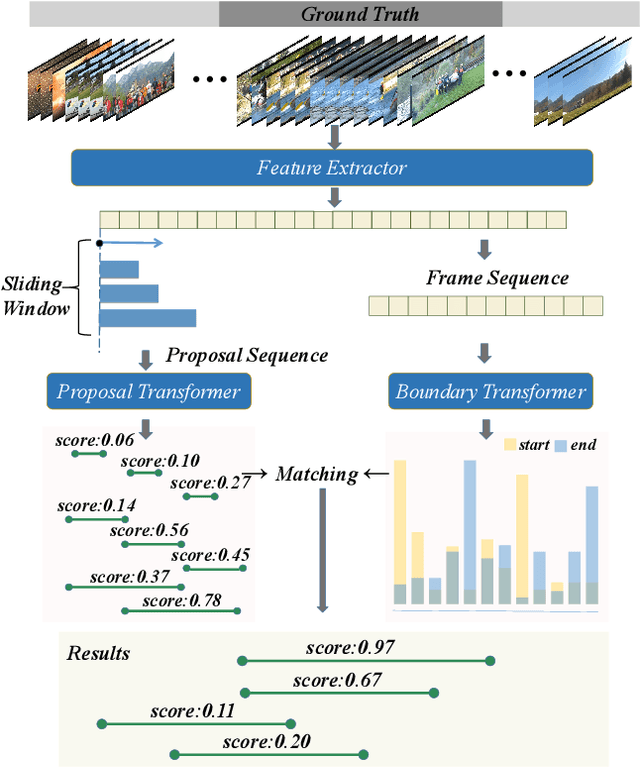
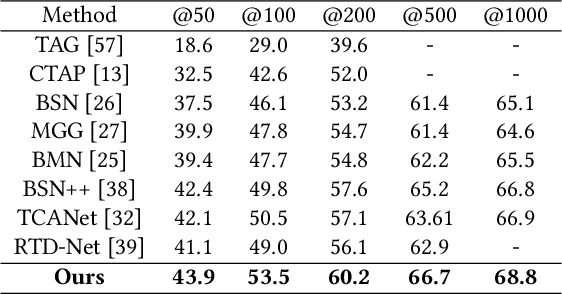
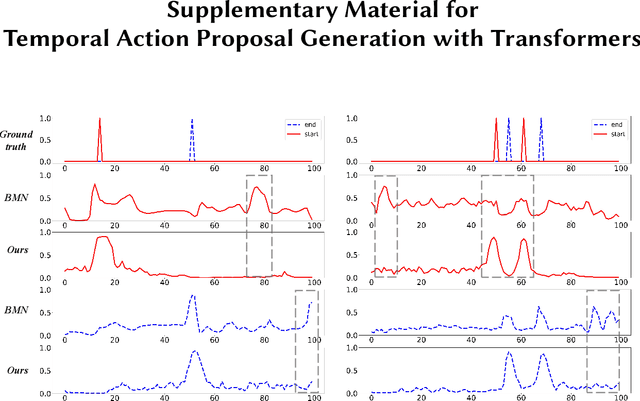
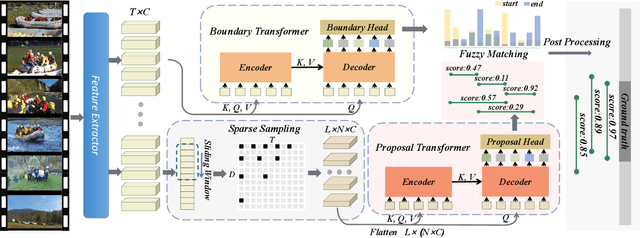
Transformer networks are effective at modeling long-range contextual information and have recently demonstrated exemplary performance in the natural language processing domain. Conventionally, the temporal action proposal generation (TAPG) task is divided into two main sub-tasks: boundary prediction and proposal confidence prediction, which rely on the frame-level dependencies and proposal-level relationships separately. To capture the dependencies at different levels of granularity, this paper intuitively presents a unified temporal action proposal generation framework with original Transformers, called TAPG Transformer, which consists of a Boundary Transformer and a Proposal Transformer. Specifically, the Boundary Transformer captures long-term temporal dependencies to predict precise boundary information and the Proposal Transformer learns the rich inter-proposal relationships for reliable confidence evaluation. Extensive experiments are conducted on two popular benchmarks: ActivityNet-1.3 and THUMOS14, and the results demonstrate that TAPG Transformer outperforms state-of-the-art methods. Equipped with the existing action classifier, our method achieves remarkable performance on the temporal action localization task. Codes and models will be available.