 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLongitudinal Trajectory Prediction of Human-driven Vehicles Near Traffic Lights
Jun 02, 2019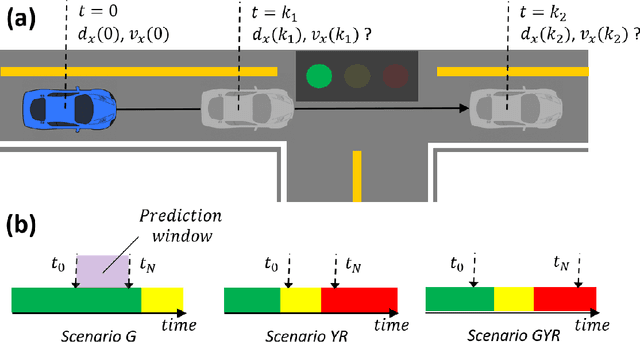
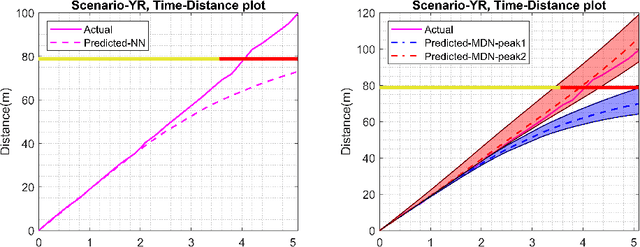
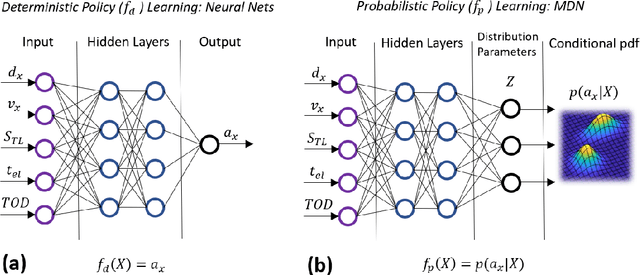
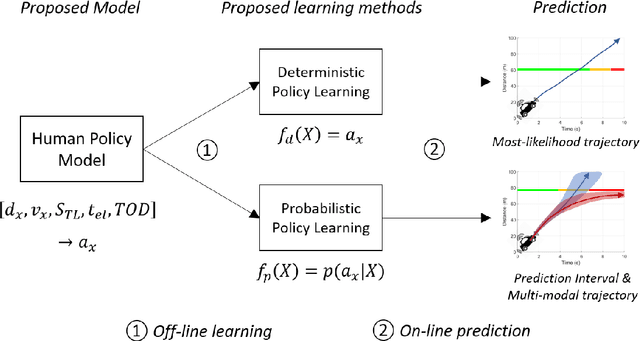
Predicting future trajectories of human-driven vehicles is a crucial problem in autonomous driving. While the trajectory prediction problem in highway has been well addressed, the problem in city driving where the motions of vehicles are governed by traffic lights has barely been discussed. Despite its importance, no comprehensive model which predicts longitudinal trajectories of vehicles near traffic signals is available. Our idea is to simply utilize information from vehicle-to-infrastructure communications to model how human drivers drive near traffic signals and use the model for the longitudinal trajectory prediction. We propose a "human policy model" which maps a state of a human vehicle and a traffic signal to a longitudinal acceleration of the vehicle. The proposed model is trained on 471,273 data points sampled from 3,398 real-world historical trips conducted by 583 distinct vehicles near a signalized intersection. We used a neural network for learning deterministic (most-likelihood) human policy and a mixture density network for learning probabilistic human policy. Our most-likelihood predictions were as accurate as 0.9-2.3m for the position and 0.3-0.9m/s for the speed (the median error between the predicted and the actual value at 5 seconds into the future) depending on scenarios. This result is far superior to the results obtained from other available models. Our probabilistic policy model provides probabilistic contexts for the predicted trajectories. It is also capable of learning multi-modal distributions which allows the model to capture competing policies, for example, 'pass' or 'stop' in the yellow-light dilemma zone. Finally, we conducted an ablation study to identify the influence of the state features on the deterministic policy model.
Developing Robot Driver Etiquette Based on Naturalistic Human Driving Behavior
Aug 01, 2018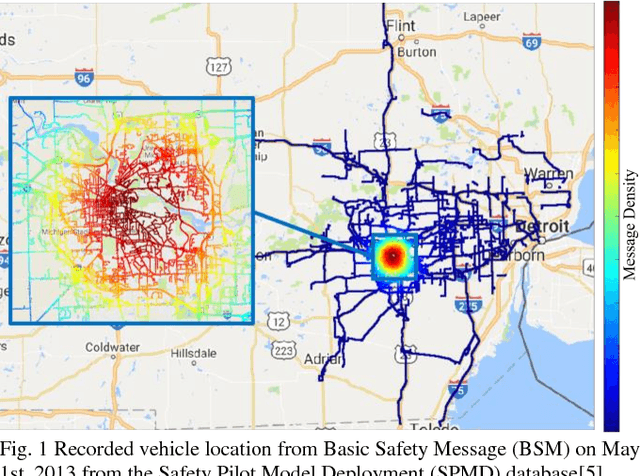
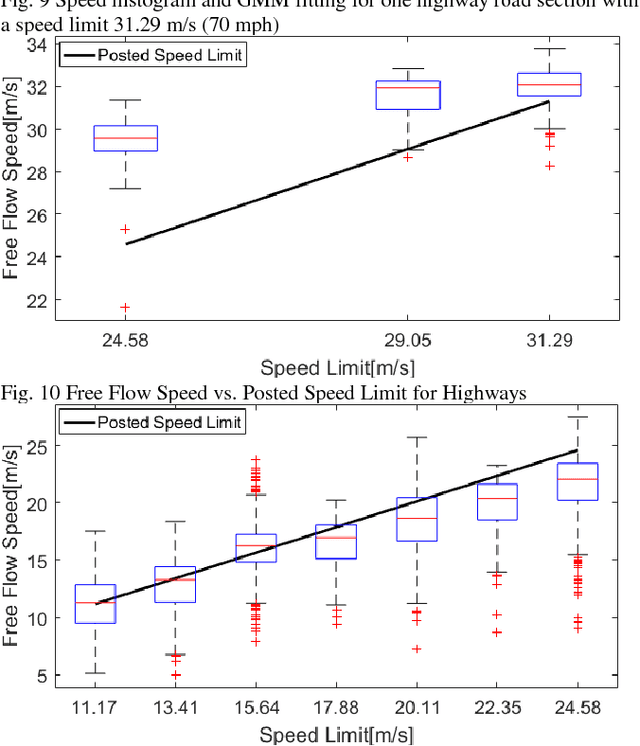
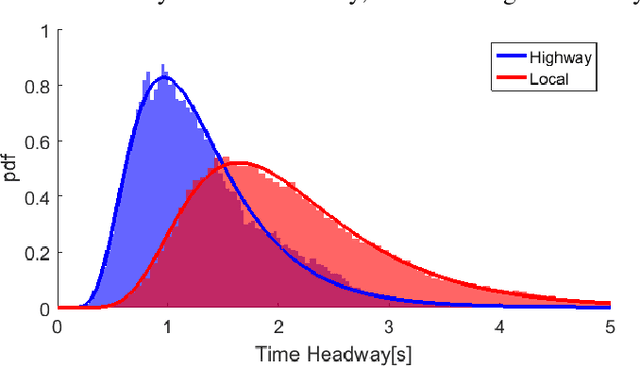
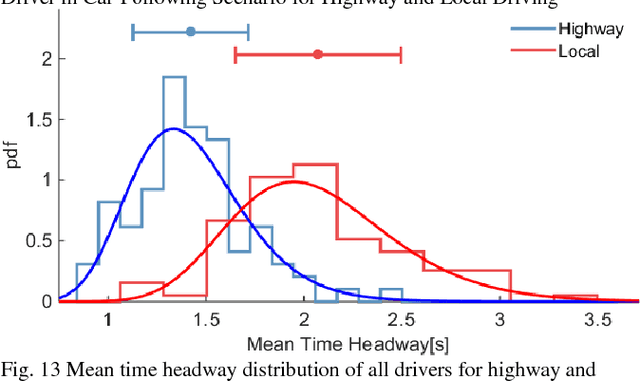
Automated vehicles can change the society by improved safety, mobility and fuel efficiency. However, due to the higher cost and change in business model, over the coming decades, the highly automated vehicles likely will continue to interact with many human-driven vehicles. In the past, the control/design of the highly automated (robotic) vehicles mainly considers safety and efficiency but failed to address the "driving culture" of surrounding human-driven vehicles. Thus, the robotic vehicles may demonstrate behaviors very different from other vehicles. We study this "driving etiquette" problem in this paper. As the first step, we report the key behavior parameters of human driven vehicles derived from a large naturalistic driving database. The results can be used to guide future algorithm design of highly automated vehicles or to develop realistic human-driven vehicle behavior model in simulations.
Evaluation of Automated Vehicles Encountering Pedestrians at Unsignalized Crossings
Mar 28, 2017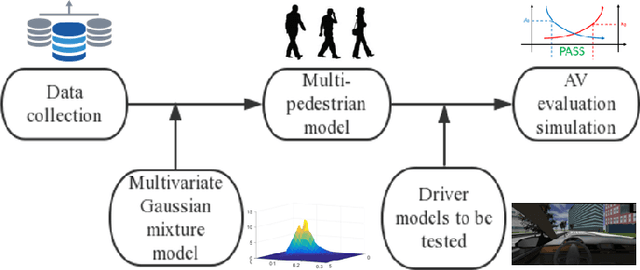
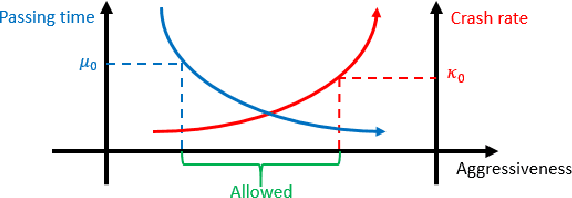
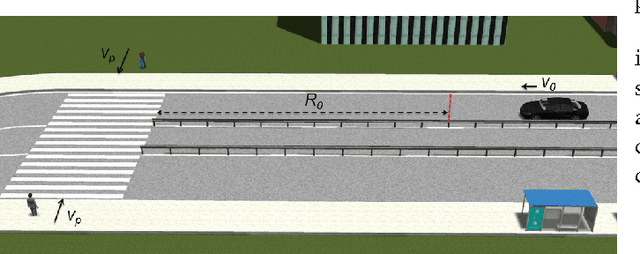
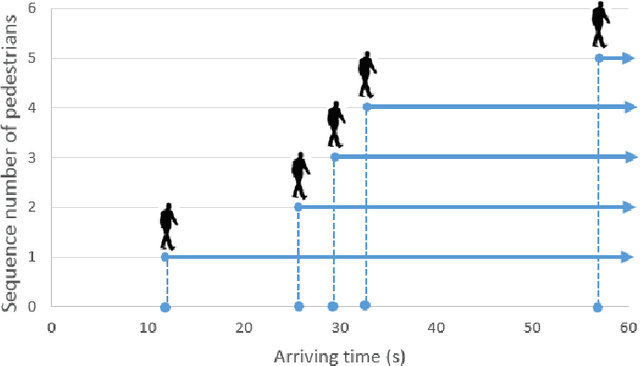
Interactions between vehicles and pedestrians have always been a major problem in traffic safety. Experienced human drivers are able to analyze the environment and choose driving strategies that will help them avoid crashes. What is not yet clear, however, is how automated vehicles will interact with pedestrians. This paper proposes a new method for evaluating the safety and feasibility of the driving strategy of automated vehicles when encountering unsignalized crossings. MobilEye sensors installed on buses in Ann Arbor, Michigan, collected data on 2,973 valid crossing events. A stochastic interaction model was then created using a multivariate Gaussian mixture model. This model allowed us to simulate the movements of pedestrians reacting to an oncoming vehicle when approaching unsignalized crossings, and to evaluate the passing strategies of automated vehicles. A simulation was then conducted to demonstrate the evaluation procedure.
Accelerated Evaluation of Automated Vehicles Safety in Lane Change Scenarios Based on Importance Sampling Techniques
Jun 16, 2016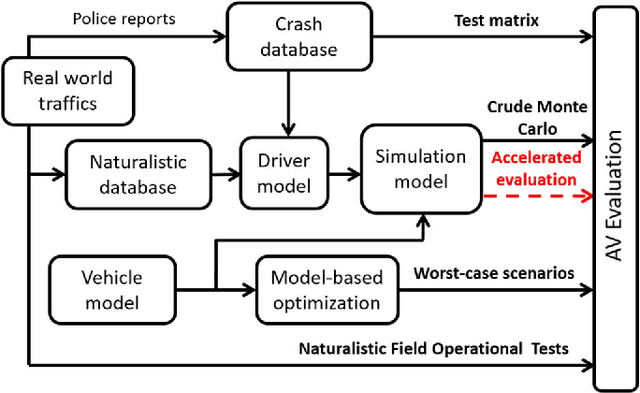
Automated vehicles (AVs) must be evaluated thoroughly before their release and deployment. A widely-used evaluation approach is the Naturalistic-Field Operational Test (N-FOT), which tests prototype vehicles directly on the public roads. Due to the low exposure to safety-critical scenarios, N-FOTs are time-consuming and expensive to conduct. In this paper, we propose an accelerated evaluation approach for AVs. The results can be used to generate motions of the primary other vehicles to accelerate the verification of AVs in simulations and controlled experiments. Frontal collision due to unsafe cut-ins is the target crash type of this paper. Human-controlled vehicles making unsafe lane changes are modeled as the primary disturbance to AVs based on data collected by the University of Michigan Safety Pilot Model Deployment Program. The cut-in scenarios are generated based on skewed statistics of collected human driver behaviors, which generate risky testing scenarios while preserving the statistical information so that the safety benefits of AVs in non-accelerated cases can be accurately estimated. The Cross Entropy method is used to recursively search for the optimal skewing parameters. The frequencies of occurrence of conflicts, crashes and injuries are estimated for a modeled automated vehicle, and the achieved accelerated rate is around 2,000 to 20,000. In other words, in the accelerated simulations, driving for 1,000 miles will expose the AV with challenging scenarios that will take about 2 to 20 million miles of real-world driving to encounter. This technique thus has the potential to reduce greatly the development and validation time for AVs.