 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProgram Synthesis with Large Language Models
Aug 16, 2021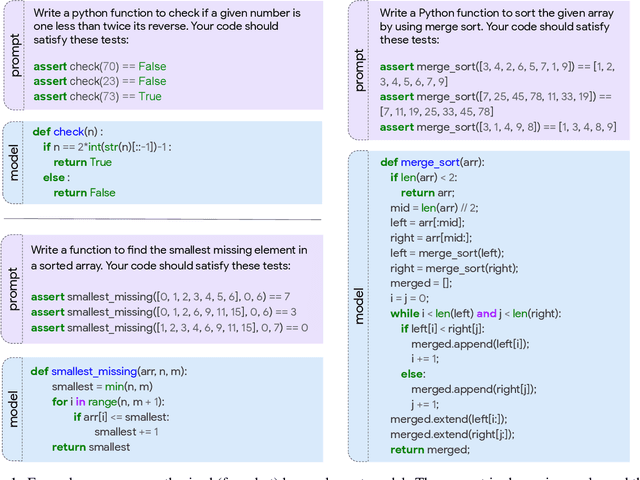
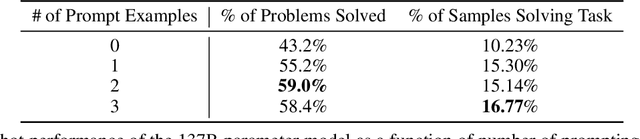
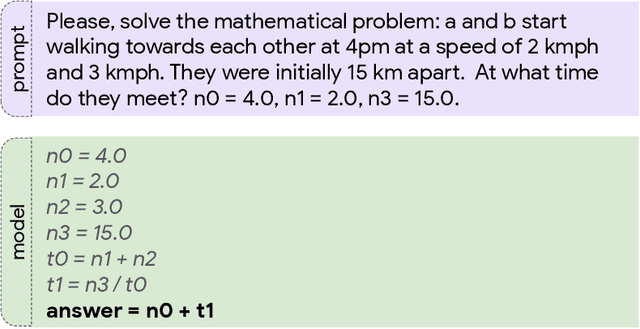
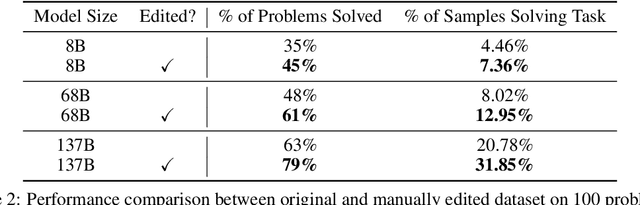
This paper explores the limits of the current generation of large language models for program synthesis in general purpose programming languages. We evaluate a collection of such models (with between 244M and 137B parameters) on two new benchmarks, MBPP and MathQA-Python, in both the few-shot and fine-tuning regimes. Our benchmarks are designed to measure the ability of these models to synthesize short Python programs from natural language descriptions. The Mostly Basic Programming Problems (MBPP) dataset contains 974 programming tasks, designed to be solvable by entry-level programmers. The MathQA-Python dataset, a Python version of the MathQA benchmark, contains 23914 problems that evaluate the ability of the models to synthesize code from more complex text. On both datasets, we find that synthesis performance scales log-linearly with model size. Our largest models, even without finetuning on a code dataset, can synthesize solutions to 59.6 percent of the problems from MBPP using few-shot learning with a well-designed prompt. Fine-tuning on a held-out portion of the dataset improves performance by about 10 percentage points across most model sizes. On the MathQA-Python dataset, the largest fine-tuned model achieves 83.8 percent accuracy. Going further, we study the model's ability to engage in dialog about code, incorporating human feedback to improve its solutions. We find that natural language feedback from a human halves the error rate compared to the model's initial prediction. Additionally, we conduct an error analysis to shed light on where these models fall short and what types of programs are most difficult to generate. Finally, we explore the semantic grounding of these models by fine-tuning them to predict the results of program execution. We find that even our best models are generally unable to predict the output of a program given a specific input.
Measuring and Improving BERT's Mathematical Abilities by Predicting the Order of Reasoning
Jun 07, 2021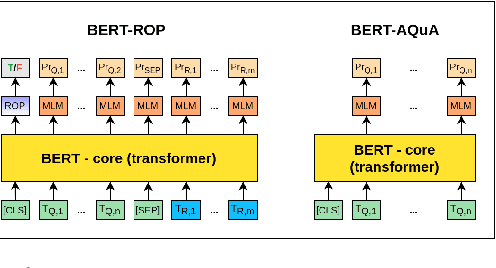
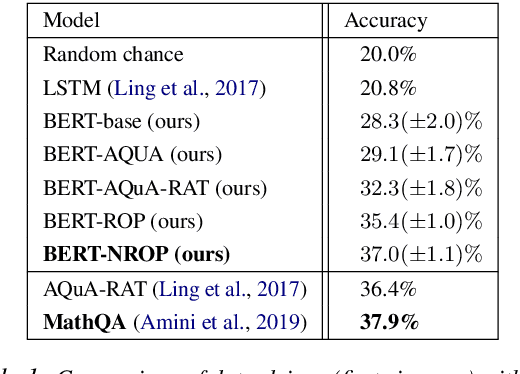
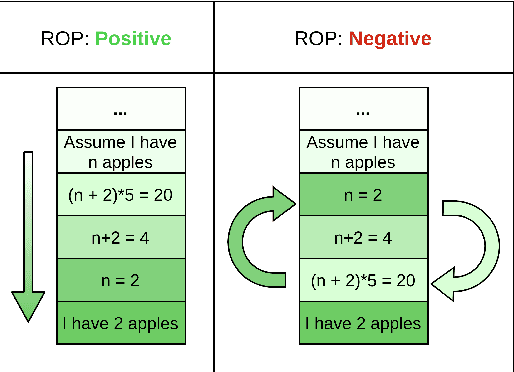
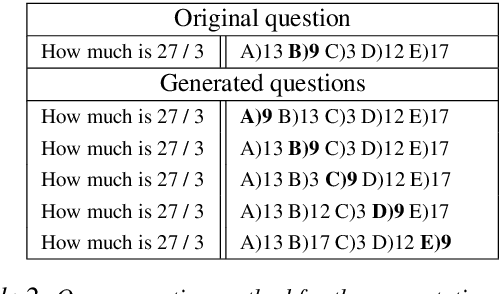
Imagine you are in a supermarket. You have two bananas in your basket and want to buy four apples. How many fruits do you have in total? This seemingly straightforward question can be challenging for data-driven language models, even if trained at scale. However, we would expect such generic language models to possess some mathematical abilities in addition to typical linguistic competence. Towards this goal, we investigate if a commonly used language model, BERT, possesses such mathematical abilities and, if so, to what degree. For that, we fine-tune BERT on a popular dataset for word math problems, AQuA-RAT, and conduct several tests to understand learned representations better. Since we teach models trained on natural language to do formal mathematics, we hypothesize that such models would benefit from training on semi-formal steps that explain how math results are derived. To better accommodate such training, we also propose new pretext tasks for learning mathematical rules. We call them (Neighbor) Reasoning Order Prediction (ROP or NROP). With this new model, we achieve significantly better outcomes than data-driven baselines and even on-par with more tailored models. We also show how to reduce positional bias in such models.
Q-Value Weighted Regression: Reinforcement Learning with Limited Data
Feb 12, 2021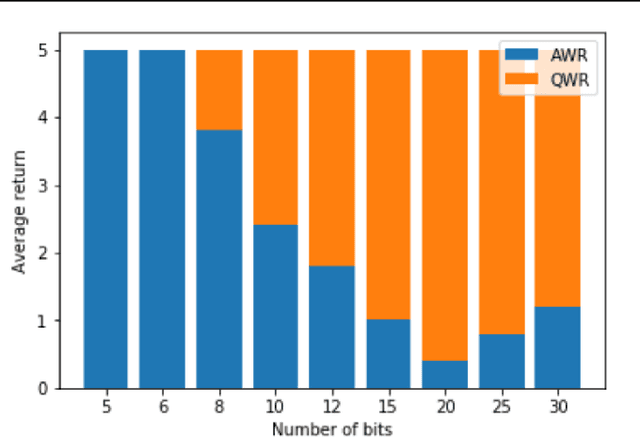
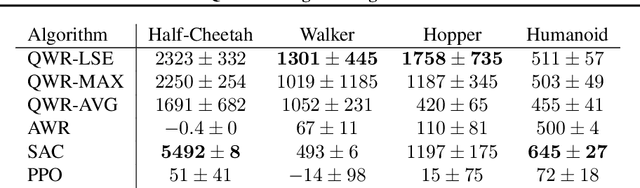
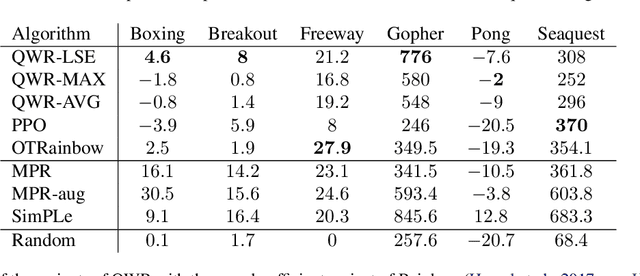
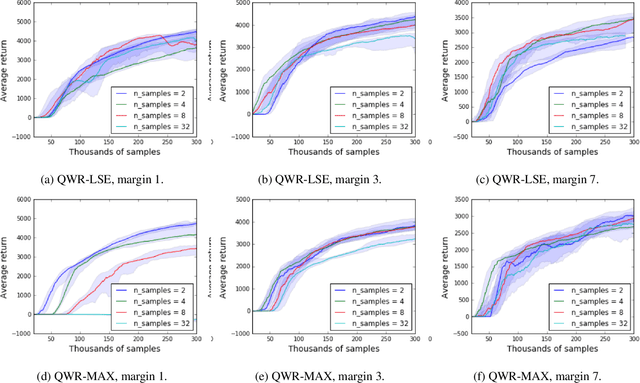
Sample efficiency and performance in the offline setting have emerged as significant challenges of deep reinforcement learning. We introduce Q-Value Weighted Regression (QWR), a simple RL algorithm that excels in these aspects. QWR is an extension of Advantage Weighted Regression (AWR), an off-policy actor-critic algorithm that performs very well on continuous control tasks, also in the offline setting, but has low sample efficiency and struggles with high-dimensional observation spaces. We perform an analysis of AWR that explains its shortcomings and use these insights to motivate QWR. We show experimentally that QWR matches the state-of-the-art algorithms both on tasks with continuous and discrete actions. In particular, QWR yields results on par with SAC on the MuJoCo suite and - with the same set of hyperparameters - yields results on par with a highly tuned Rainbow implementation on a set of Atari games. We also verify that QWR performs well in the offline RL setting.
CARLA Real Traffic Scenarios -- novel training ground and benchmark for autonomous driving
Dec 16, 2020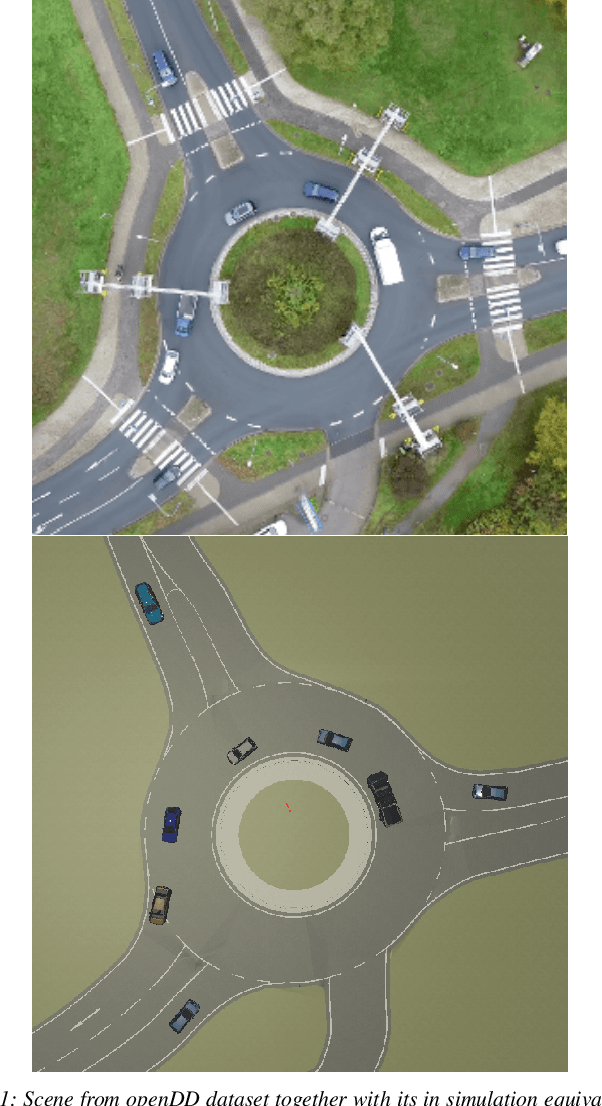
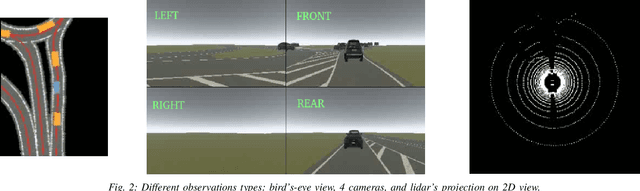
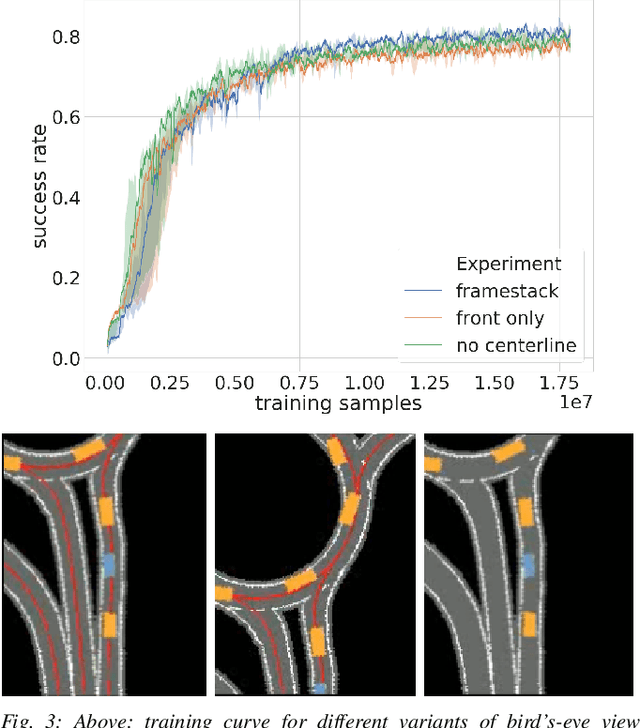
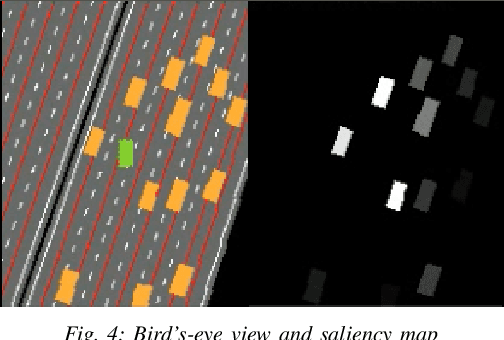
This work introduces interactive traffic scenarios in the CARLA simulator, which are based on real-world traffic. We concentrate on tactical tasks lasting several seconds, which are especially challenging for current control methods. The CARLA Real Traffic Scenarios (CRTS) is intended to be a training and testing ground for autonomous driving systems. To this end, we open-source the code under a permissive license and present a set of baseline policies. CRTS combines the realism of traffic scenarios and the flexibility of simulation. We use it to train agents using a reinforcement learning algorithm. We show how to obtain competitive polices and evaluate experimentally how observation types and reward schemes affect the training process and the resulting agent's behavior.
Neural heuristics for SAT solving
May 27, 2020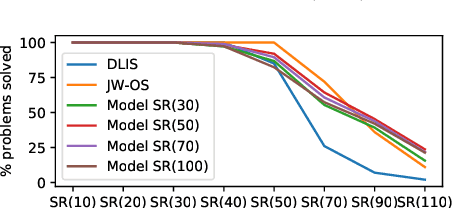
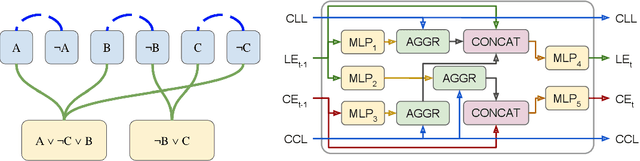
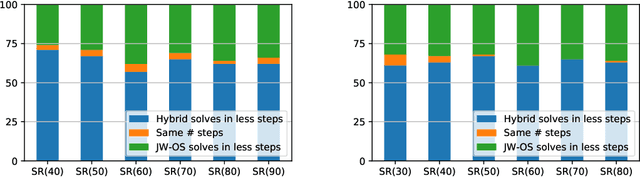
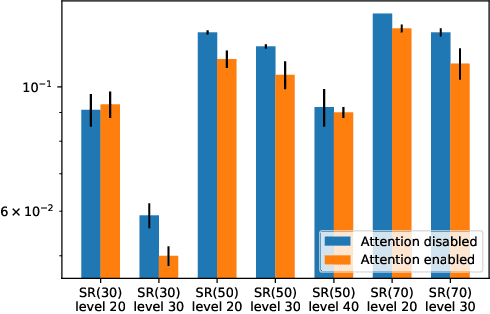
We use neural graph networks with a message-passing architecture and an attention mechanism to enhance the branching heuristic in two SAT-solving algorithms. We report improvements of learned neural heuristics compared with two standard human-designed heuristics.
Simulation-based reinforcement learning for real-world autonomous driving
Dec 26, 2019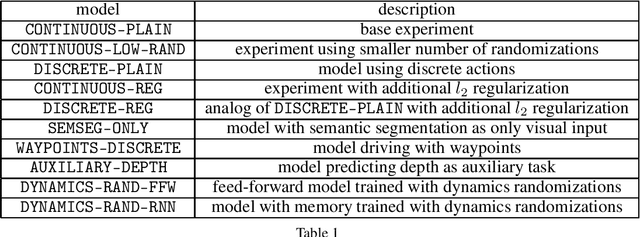
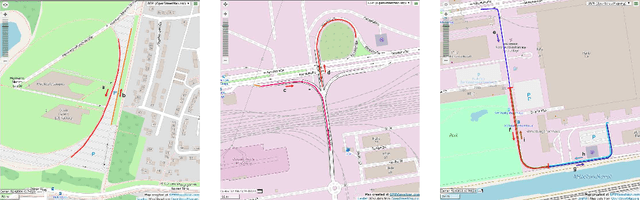
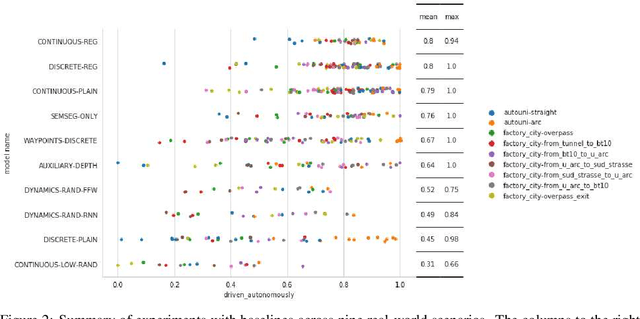
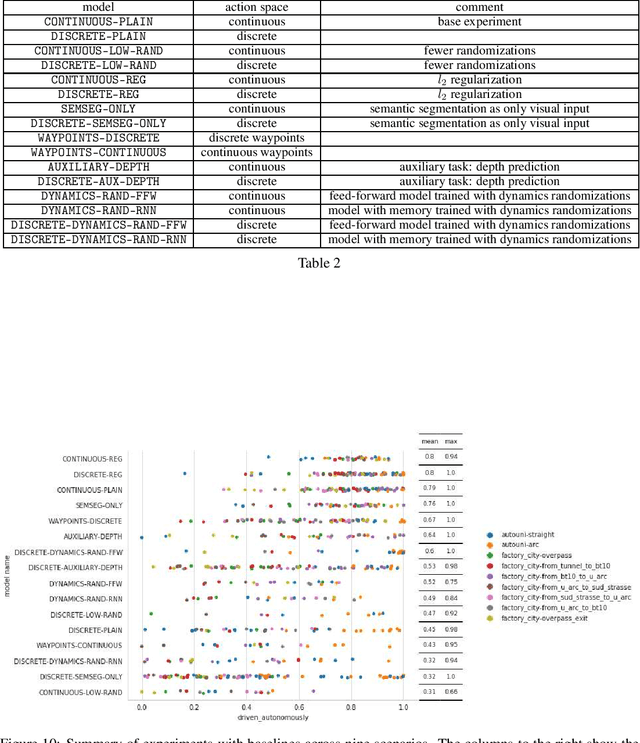
We use synthetic data and a reinforcement learning algorithm to train a system controlling a full-size real-world vehicle in a number of restricted driving scenarios. The driving policy uses RGB images as input. We analyze how design decisions about perception, control and training impact the real-world performance.
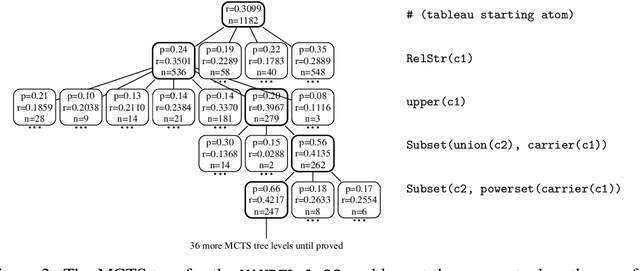
Towards Finding Longer Proofs
May 30, 2019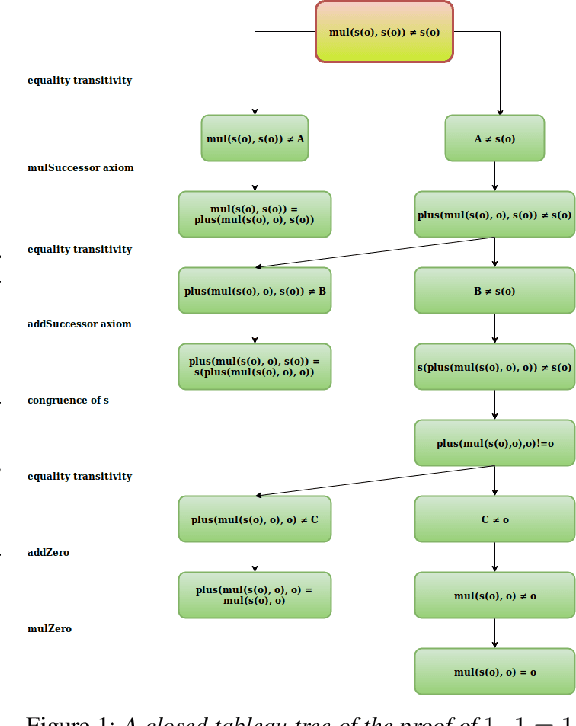
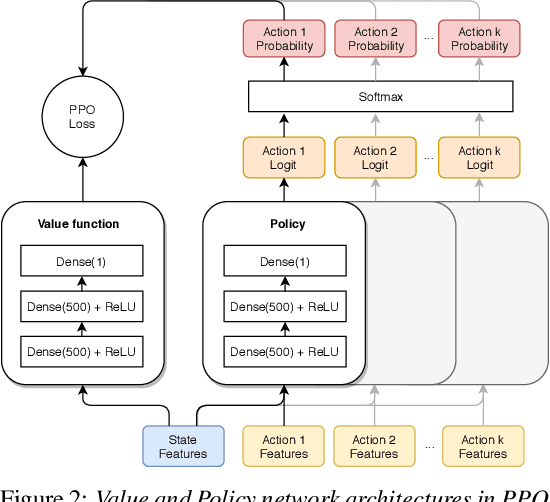
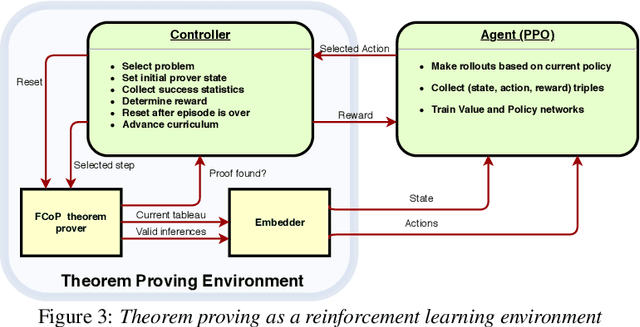
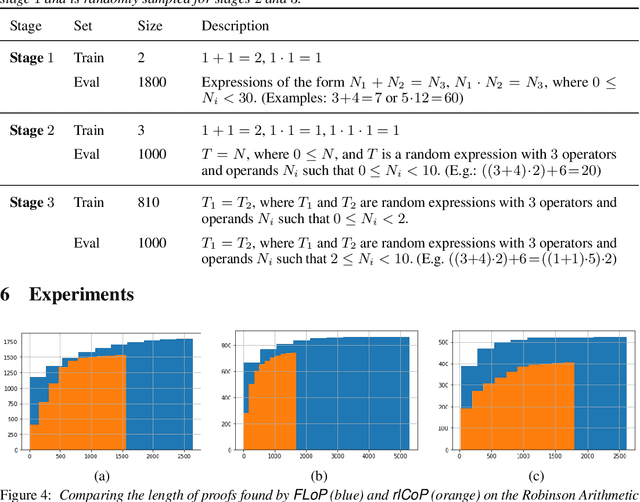
We present a reinforcement learning (RL) based guidance system for automated theorem proving geared towards Finding Longer Proofs (FLoP). FLoP focuses on generalizing from short proofs to longer ones of similar structure. To achieve that, FLoP uses state-of-the-art RL approaches that were previously not applied in theorem proving. In particular, we show that curriculum learning significantly outperforms previous learning-based proof guidance on a synthetic dataset of increasingly difficult arithmetic problems.
Model-Based Reinforcement Learning for Atari
Mar 05, 2019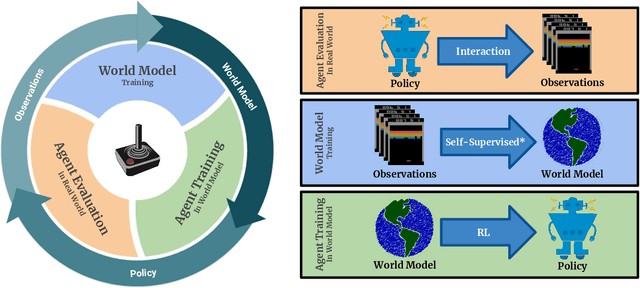
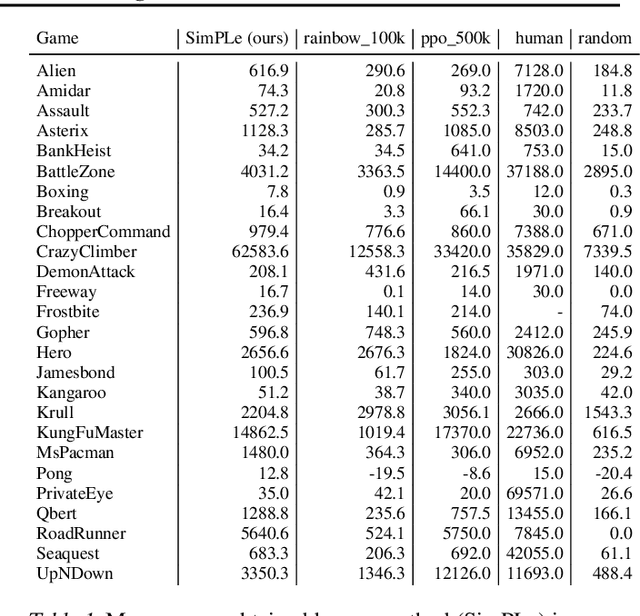
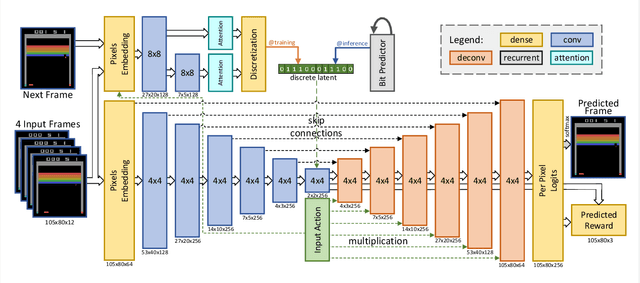
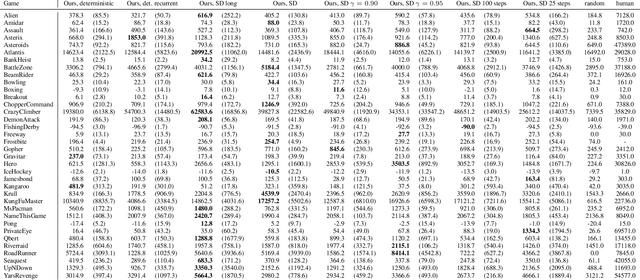
Model-free reinforcement learning (RL) can be used to learn effective policies for complex tasks, such as Atari games, even from image observations. However, this typically requires very large amounts of interaction -- substantially more, in fact, than a human would need to learn the same games. How can people learn so quickly? Part of the answer may be that people can learn how the game works and predict which actions will lead to desirable outcomes. In this paper, we explore how video prediction models can similarly enable agents to solve Atari games with orders of magnitude fewer interactions than model-free methods. We describe Simulated Policy Learning (SimPLe), a complete model-based deep RL algorithm based on video prediction models and present a comparison of several model architectures, including a novel architecture that yields the best results in our setting. Our experiments evaluate SimPLe on a range of Atari games and achieve competitive results with only 100K interactions between the agent and the environment (400K frames), which corresponds to about two hours of real-time play.
Expert-augmented actor-critic for ViZDoom and Montezumas Revenge
Sep 10, 2018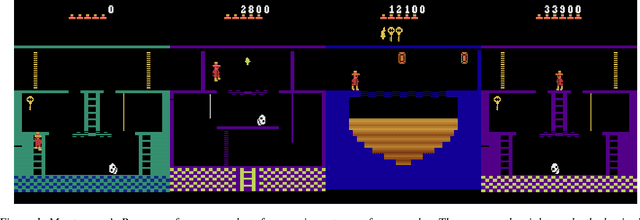
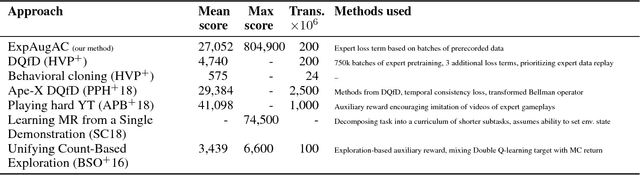

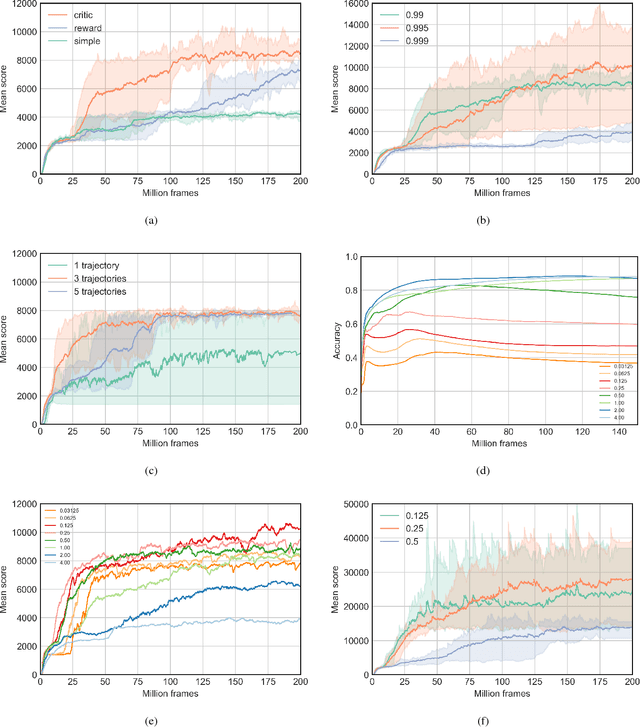
We propose an expert-augmented actor-critic algorithm, which we evaluate on two environments with sparse rewards: Montezumas Revenge and a demanding maze from the ViZDoom suite. In the case of Montezumas Revenge, an agent trained with our method achieves very good results consistently scoring above 27,000 points (in many experiments beating the first world). With an appropriate choice of hyperparameters, our algorithm surpasses the performance of the expert data. In a number of experiments, we have observed an unreported bug in Montezumas Revenge which allowed the agent to score more than 800,000 points.
Reinforcement Learning of Theorem Proving
May 19, 2018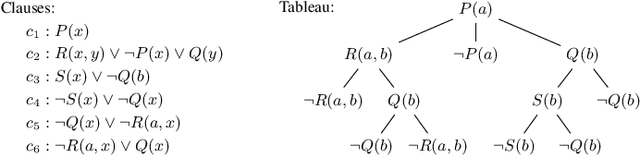


We introduce a theorem proving algorithm that uses practically no domain heuristics for guiding its connection-style proof search. Instead, it runs many Monte-Carlo simulations guided by reinforcement learning from previous proof attempts. We produce several versions of the prover, parameterized by different learning and guiding algorithms. The strongest version of the system is trained on a large corpus of mathematical problems and evaluated on previously unseen problems. The trained system solves within the same number of inferences over 40% more problems than a baseline prover, which is an unusually high improvement in this hard AI domain. To our knowledge this is the first time reinforcement learning has been convincingly applied to solving general mathematical problems on a large scale.