 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCARLA Real Traffic Scenarios -- novel training ground and benchmark for autonomous driving
Dec 16, 2020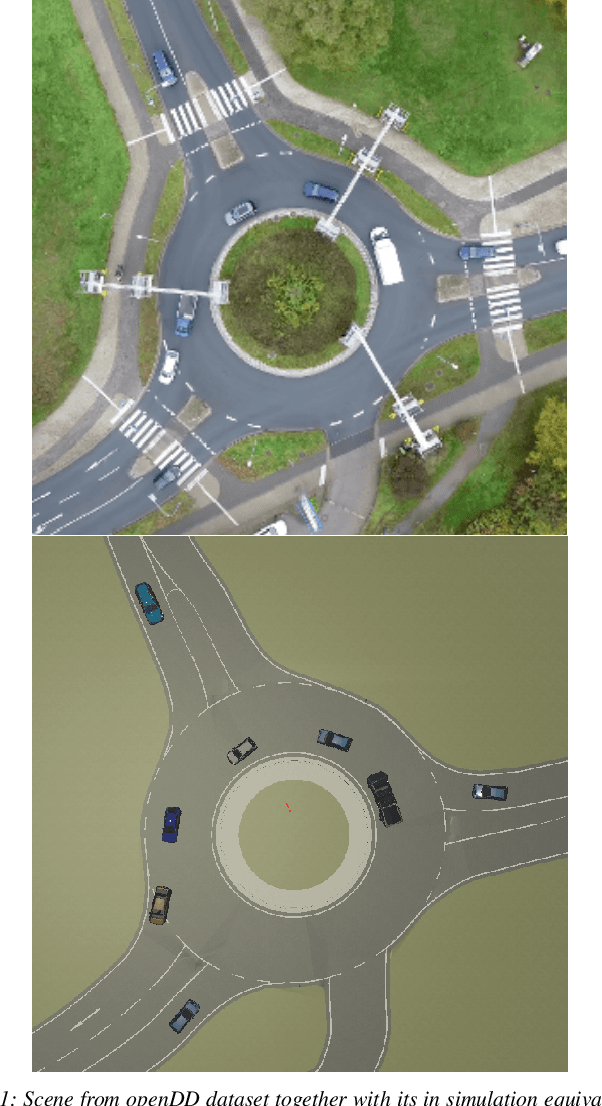
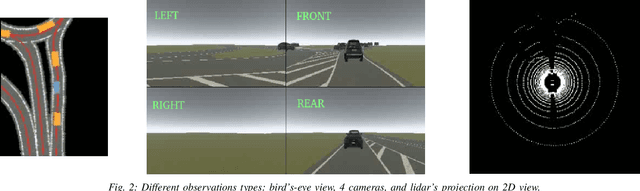
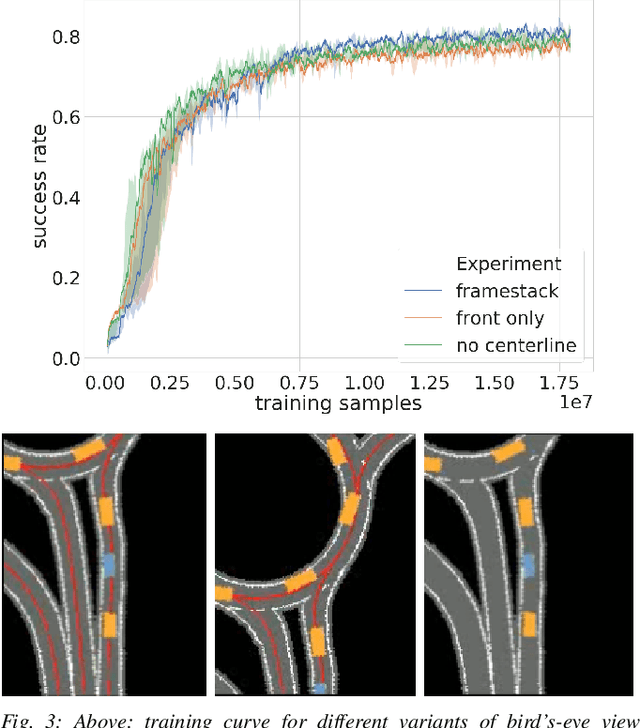
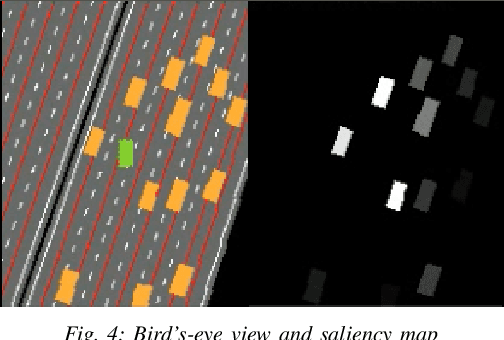
This work introduces interactive traffic scenarios in the CARLA simulator, which are based on real-world traffic. We concentrate on tactical tasks lasting several seconds, which are especially challenging for current control methods. The CARLA Real Traffic Scenarios (CRTS) is intended to be a training and testing ground for autonomous driving systems. To this end, we open-source the code under a permissive license and present a set of baseline policies. CRTS combines the realism of traffic scenarios and the flexibility of simulation. We use it to train agents using a reinforcement learning algorithm. We show how to obtain competitive polices and evaluate experimentally how observation types and reward schemes affect the training process and the resulting agent's behavior.
openDD: A Large-Scale Roundabout Drone Dataset
Jul 16, 2020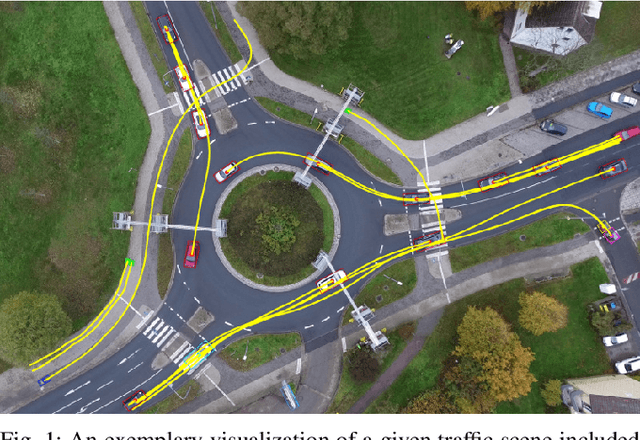
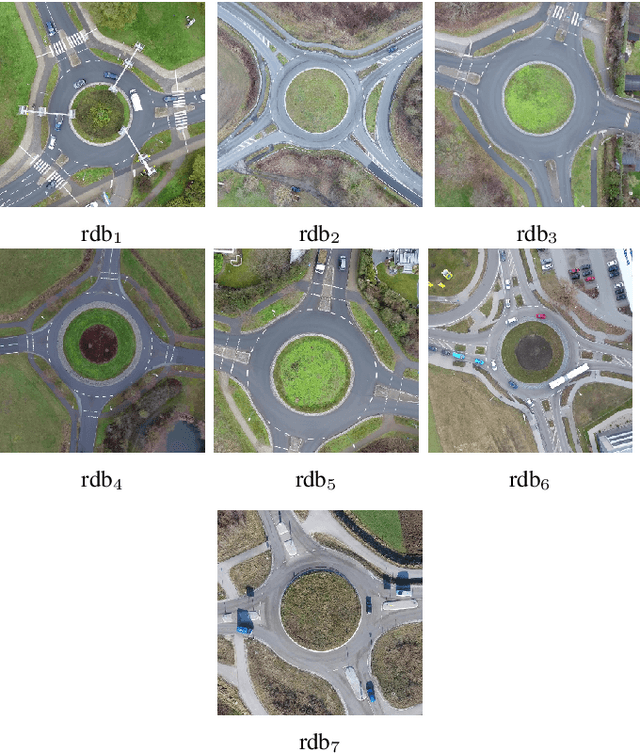
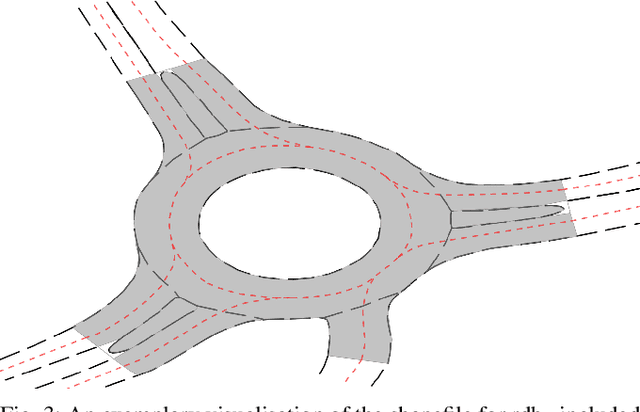
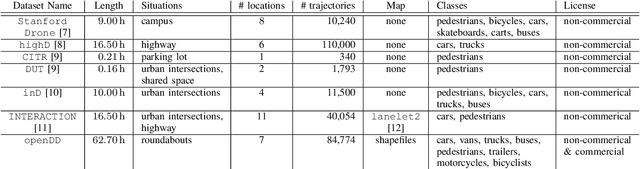
Analyzing and predicting the traffic scene around the ego vehicle has been one of the key challenges in autonomous driving. Datasets including the trajectories of all road users present in a scene, as well as the underlying road topology are invaluable to analyze the behavior of the different traffic participants. The interaction between the various traffic participants is especially high in intersection types that are not regulated by traffic lights, the most common one being the roundabout. We introduce the openDD dataset, including 84,774 accurately tracked trajectories and HD map data of seven different roundabouts. The openDD dataset is annotated using images taken by a drone in 501 separate flights, totalling in over 62 hours of trajectory data. As of today, openDD is by far the largest publicly available trajectory dataset recorded from a drone perspective, while comparable datasets span 17 hours at most. The data is available, for both commercial and noncommercial use, at: http://www.l3pilot.eu/openDD.
Planning on the fast lane: Learning to interact using attention mechanisms in path integral inverse reinforcement learning
Jul 11, 2020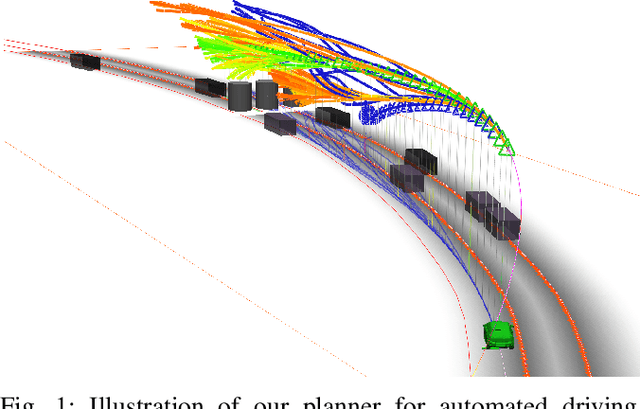
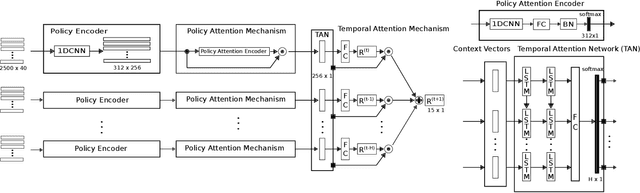
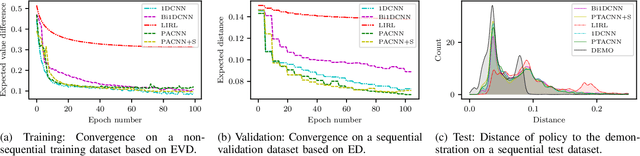
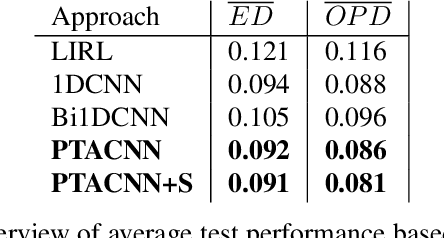
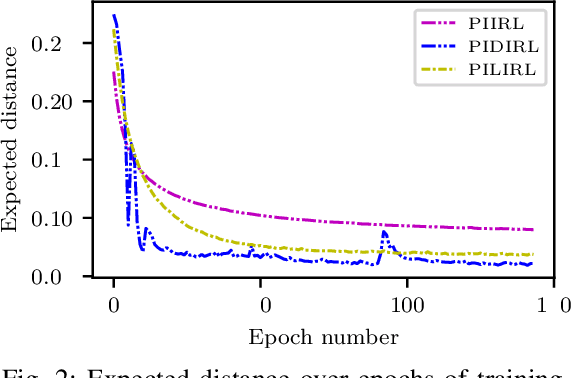
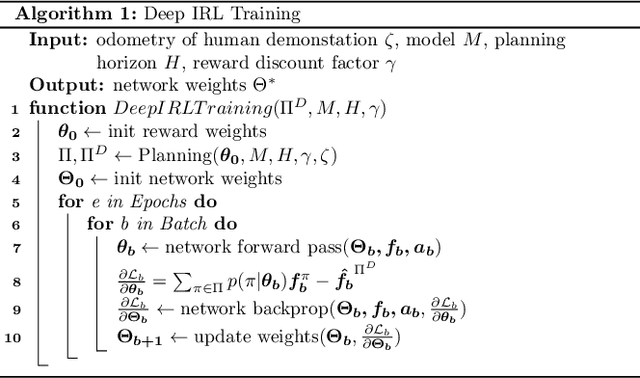
General-purpose trajectory planning algorithms for automated driving utilize complex reward functions to perform a combined optimization of strategic, behavioral, and kinematic features. The specification and tuning of a single reward function is a tedious task and does not generalize over a large set of traffic situations. Deep learning approaches based on path integral inverse reinforcement learning have been successfully applied to predict local situation-dependent reward functions using features of a set of sampled driving policies. Sample-based trajectory planning algorithms are able to approximate a spatio-temporal subspace of feasible driving policies that can be used to encode the context of a situation. However, the interaction with dynamic objects requires an extended planning horizon, which requires sequential context modeling. In this work, we are concerned with the sequential reward prediction over an extended time horizon. We present a neural network architecture that uses a policy attention mechanism to generate a low-dimensional context vector by concentrating on trajectories with a human-like driving style. Besides, we propose a temporal attention mechanism to identify context switches and allow for stable adaptation of rewards. We evaluate our results on complex simulated driving situations, including other vehicles. Our evaluation shows that our policy attention mechanisms learns to focus on collision free policies in the configuration space. Furthermore, the temporal attention mechanism learns persistent interaction with other vehicles over an extended planning horizon.
Simulation-based reinforcement learning for real-world autonomous driving
Dec 26, 2019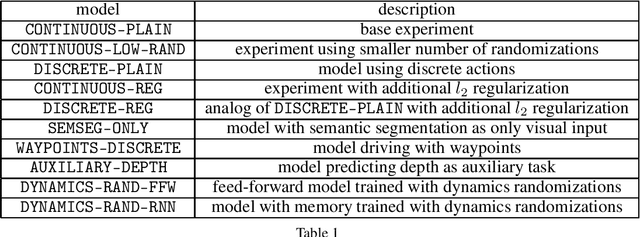
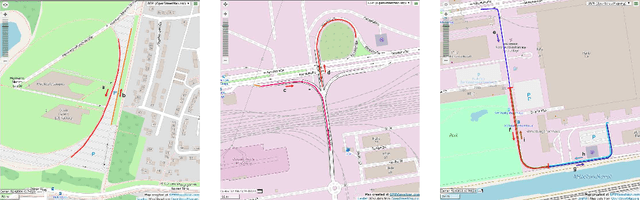
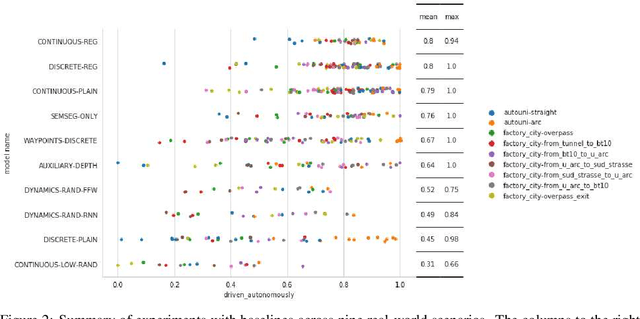
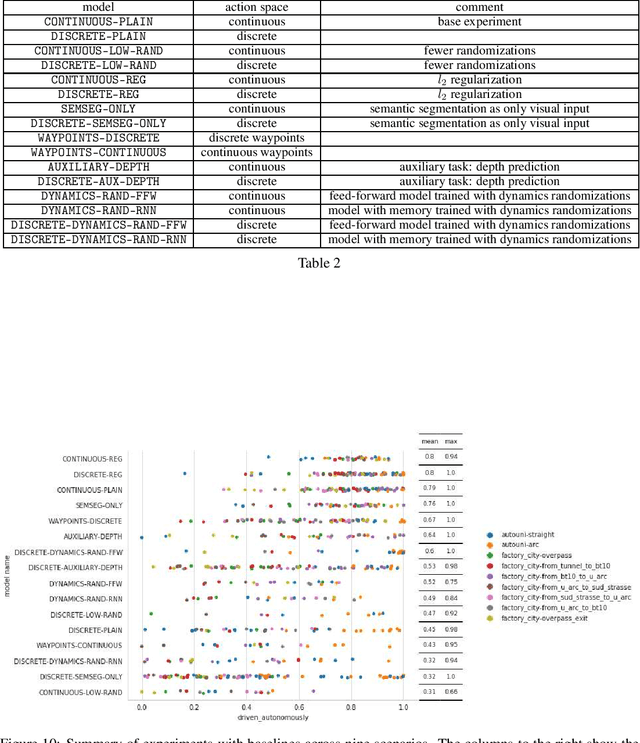
We use synthetic data and a reinforcement learning algorithm to train a system controlling a full-size real-world vehicle in a number of restricted driving scenarios. The driving policy uses RGB images as input. We analyze how design decisions about perception, control and training impact the real-world performance.
Driving Style Encoder: Situational Reward Adaptation for General-Purpose Planning in Automated Driving
Dec 07, 2019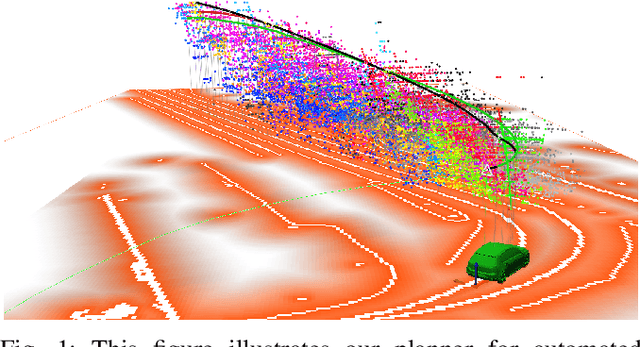
General-purpose planning algorithms for automated driving combine mission, behavior, and local motion planning. Such planning algorithms map features of the environment and driving kinematics into complex reward functions. To achieve this, planning experts often rely on linear reward functions. The specification and tuning of these reward functions is a tedious process and requires significant experience. Moreover, a manually designed linear reward function does not generalize across different driving situations. In this work, we propose a deep learning approach based on inverse reinforcement learning that generates situation-dependent reward functions. Our neural network provides a mapping between features and actions of sampled driving policies of a model-predictive control-based planner and predicts reward functions for upcoming planning cycles. In our evaluation, we compare the driving style of reward functions predicted by our deep network against clustered and linear reward functions. Our proposed deep learning approach outperforms clustered linear reward functions and is at par with linear reward functions with a-priori knowledge about the situation.
Driving with Style: Inverse Reinforcement Learning in General-Purpose Planning for Automated Driving
May 01, 2019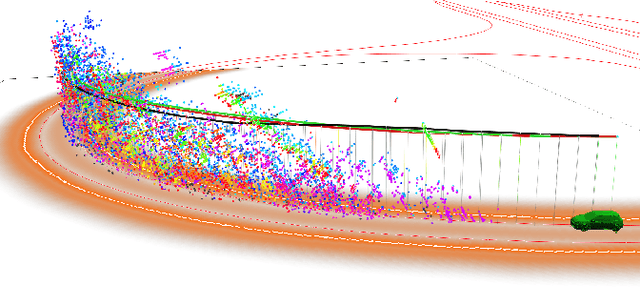
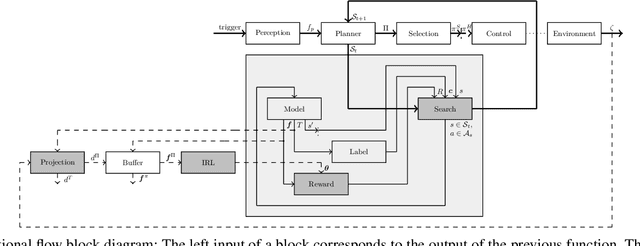
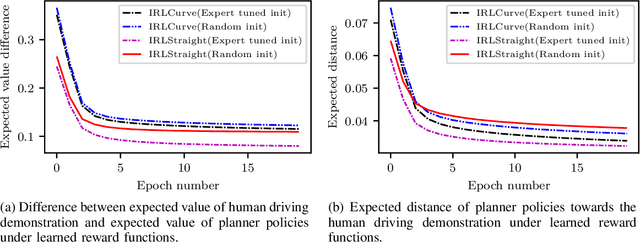
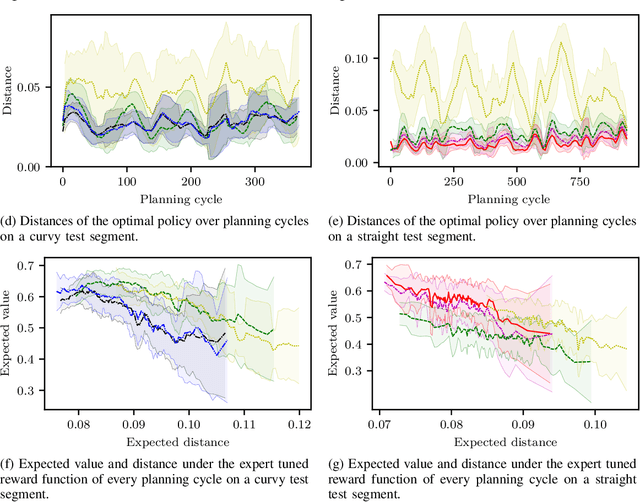
Behavior and motion planning play an important role in automated driving. Traditionally, behavior planners instruct local motion planners with predefined behaviors. Due to the high scene complexity in urban environments, unpredictable situations may occur in which behavior planners fail to match predefined behavior templates. Recently, general-purpose planners have been introduced, combining behavior and local motion planning. These general-purpose planners allow behavior-aware motion planning given a single reward function. However, two challenges arise: First, this function has to map a complex feature space into rewards. Second, the reward function has to be manually tuned by an expert. Manually tuning this reward function becomes a tedious task. In this paper, we propose an approach that relies on human driving demonstrations to automatically tune reward functions. This study offers important insights into the driving style optimization of general-purpose planners with maximum entropy inverse reinforcement learning. We evaluate our approach based on the expected value difference between learned and demonstrated policies. Furthermore, we compare the similarity of human driven trajectories with optimal policies of our planner under learned and expert-tuned reward functions. Our experiments show that we are able to learn reward functions exceeding the level of manual expert tuning without prior domain knowledge.