 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR-HTN: Rebellious Online HTN Planning for Safety and Game AI
Feb 01, 2026We introduce online Hierarchical Task Network (HTN) agents whose behaviors are governed by a set of built-in directives \D. Like other agents that are capable of rebellion (i.e., {\it intelligent disobedience}), our agents will, under some conditions, not perform a user-assigned task and instead act in ways that do not meet a user's expectations. Our work combines three concepts: HTN planning, online planning, and the directives \D, which must be considered when performing user-assigned tasks. We investigate two agent variants: (1) a Nonadaptive agent that stops execution if it finds itself in violation of \D~ and (2) an Adaptive agent that, in the same situation, instead modifies its HTN plan to search for alternative ways to achieve its given task. We present R-HTN (for: Rebellious-HTN), a general algorithm for online HTN planning under directives \D. We evaluate R-HTN in two task domains where the agent must not violate some directives for safety reasons or as dictated by their personality traits. We found that R-HTN agents never violate directives, and aim to achieve the user-given goals if feasible though not necessarily as the user expected.
Online Learning of HTN Methods for integrated LLM-HTN Planning
Nov 17, 2025We present online learning of Hierarchical Task Network (HTN) methods in the context of integrated HTN planning and LLM-based chatbots. Methods indicate when and how to decompose tasks into subtasks. Our method learner is built on top of the ChatHTN planner. ChatHTN queries ChatGPT to generate a decomposition of a task into primitive tasks when no applicable method for the task is available. In this work, we extend ChatHTN. Namely, when ChatGPT generates a task decomposition, ChatHTN learns from it, akin to memoization. However, unlike memoization, it learns a generalized method that applies not only to the specific instance encountered, but to other instances of the same task. We conduct experiments on two domains and demonstrate that our online learning procedure reduces the number of calls to ChatGPT while solving at least as many problems, and in some cases, even more.
* The Twelfth Annual Conference on Advances in Cognitive Systems (ACS-2025)
ChatHTN: Interleaving Approximate (LLM) and Symbolic HTN Planning
May 17, 2025We introduce ChatHTN, a Hierarchical Task Network (HTN) planner that combines symbolic HTN planning techniques with queries to ChatGPT to approximate solutions in the form of task decompositions. The resulting hierarchies interleave task decompositions generated by symbolic HTN planning with those generated by ChatGPT. Despite the approximate nature of the results generates by ChatGPT, ChatHTN is provably sound; any plan it generates correctly achieves the input tasks. We demonstrate this property with an open-source implementation of our system.
Task Modifiers for HTN Planning and Acting
Feb 09, 2022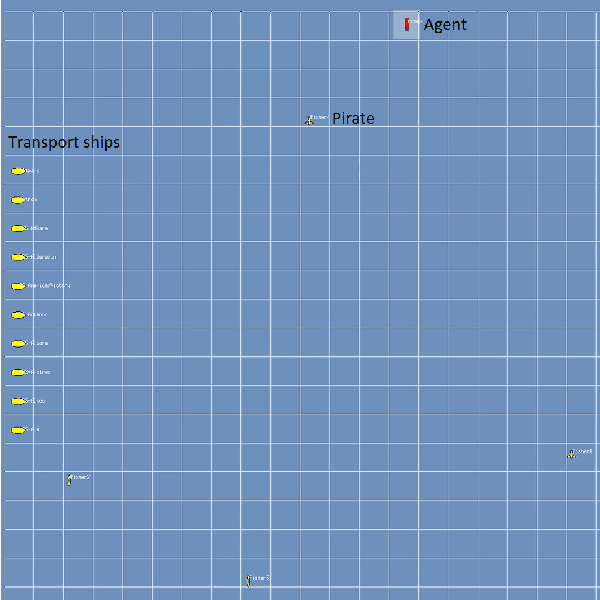
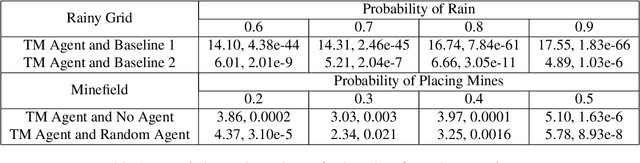
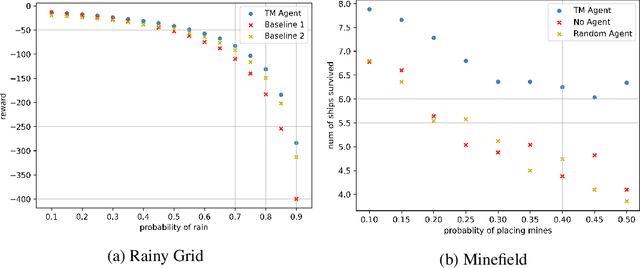
The ability of an agent to change its objectives in response to unexpected events is desirable in dynamic environments. In order to provide this capability to hierarchical task network (HTN) planning, we propose an extension of the paradigm called task modifiers, which are functions that receive a task list and a state and produce a new task list. We focus on a particular type of problems in which planning and execution are interleaved and the ability to handle exogenous events is crucial. To determine the efficacy of this approach, we evaluate the performance of our task modifier implementation in two environments, one of which is a simulation that differs substantially from traditional HTN domains.