 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent Multi-View Fidelity in Autonomous UAV Swarm Sport Injury Detection
May 10, 2025Accurate, real-time collision detection is essential for ensuring player safety and effective refereeing in high-contact sports such as rugby, particularly given the severe risks associated with traumatic brain injuries (TBI). Traditional collision-monitoring methods employing fixed cameras or wearable sensors face limitations in visibility, coverage, and responsiveness. Previously, we introduced a framework using unmanned aerial vehicles (UAVs) for monitoring and real time kinematics extraction from videos of collision events. In this paper, we show that the strategies operating on the objective of ensuring at least one UAV captures every incident on the pitch have an emergent property of fulfilling a stronger key condition for successful kinematics extraction. Namely, they ensure that almost all collisions are captured by multiple drones, establishing multi-view fidelity and redundancy, while not requiring any drone-to-drone communication.
Decentralised, Self-Organising Drone Swarms using Coupled Oscillators
May 01, 2025



The problem of robotic synchronisation and coordination is a long-standing one. Combining autonomous, computerised systems with unpredictable real-world conditions can have consequences ranging from poor performance to collisions and damage. This paper proposes using coupled oscillators to create a drone swarm that is decentralised and self organising. This allows for greater flexibility and adaptiveness than a hard-coded swarm, with more resilience and scalability than a centralised system. Our method allows for a variable number of drones to spontaneously form a swarm and react to changing swarm conditions. Additionally, this method includes provisions to prevent communication interference between drones, and signal processing techniques to ensure a smooth and cohesive swarm.
Emergence of Roles in Robotic Teams with Model Sharing and Limited Communication
May 01, 2025



We present a reinforcement learning strategy for use in multi-agent foraging systems in which the learning is centralised to a single agent and its model is periodically disseminated among the population of non-learning agents. In a domain where multi-agent reinforcement learning (MARL) is the common approach, this approach aims to significantly reduce the computational and energy demands compared to approaches such as MARL and centralised learning models. By developing high performing foraging agents, these approaches can be translated into real-world applications such as logistics, environmental monitoring, and autonomous exploration. A reward function was incorporated into this approach that promotes role development among agents, without explicit directives. This led to the differentiation of behaviours among the agents. The implicit encouragement of role differentiation allows for dynamic actions in which agents can alter roles dependent on their interactions with the environment without the need for explicit communication between agents.
Strategies for decentralised UAV-based collisions monitoring in rugby
Mar 27, 2025



Recent advancements in unmanned aerial vehicle (UAV) technology have opened new avenues for dynamic data collection in challenging environments, such as sports fields during fast-paced sports action. For the purposes of monitoring sport events for dangerous injuries, we envision a coordinated UAV fleet designed to capture high-quality, multi-view video footage of collision events in real-time. The extracted video data is crucial for analyzing athletes' motions and investigating the probability of sports-related traumatic brain injuries (TBI) during impacts. This research implemented a UAV fleet system on the NetLogo platform, utilizing custom collision detection algorithms to compare against traditional TV-coverage strategies. Our system supports decentralized data capture and autonomous processing, providing resilience in the rapidly evolving dynamics of sports collisions. The collaboration algorithm integrates both shared and local data to generate multi-step analyses aimed at determining the efficacy of custom methods in enhancing the accuracy of TBI prediction models. Missions are simulated in real-time within a two-dimensional model, focusing on the strategic capture of collision events that could lead to TBI, while considering operational constraints such as rapid UAV maneuvering and optimal positioning. Preliminary results from the NetLogo simulations suggest that custom collision detection methods offer superior performance over standard TV-coverage strategies by enabling more precise and timely data capture. This comparative analysis highlights the advantages of tailored algorithmic approaches in critical sports safety applications.
Applying Intelligent Reflector Surfaces for Detecting Respiratory Aerosol Cloud using Terahertz Signals
Aug 17, 2021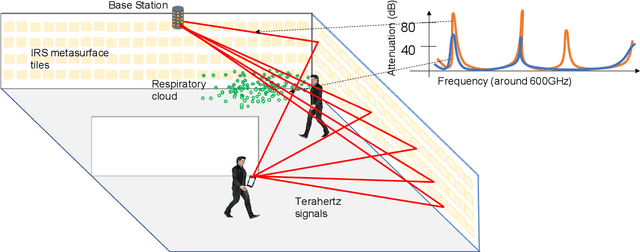
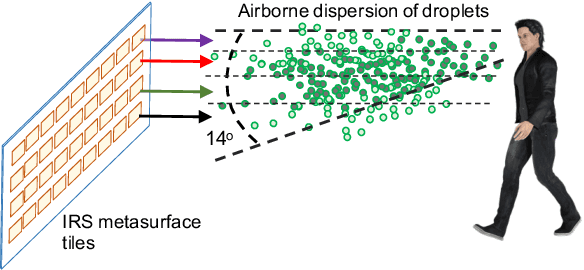
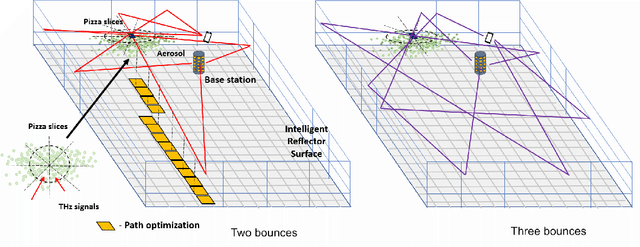
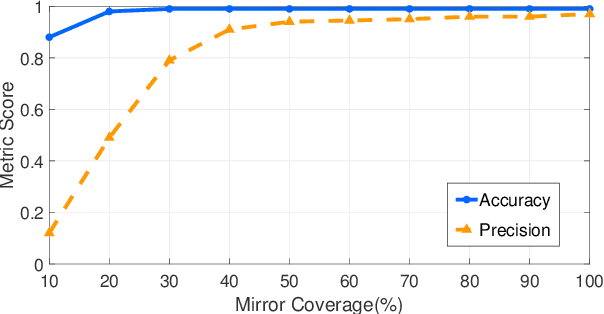
The recent COVID-19 pandemic has driven researchers from different spectrum to develop novel solutions that can improve detection and understanding of SARS-CoV-2 virus. In this article we propose the use of Intelligent Reflector Surface (IRS) emitting terahertz signals to detect airborne respiratory aerosol cloud that are secreted from people. Our proposed approach makes use of future IRS infrastructure to extend beyond communication functionality by adding environmental scanning for aerosol clouds. Simulations have also been conducted to analyze the accuracy of aerosol cloud detection based on a signal scanning and path optimization algorithm. Utilizing IRS for detecting respiratory aerosol cloud can lead to new added value of telecommunication infrastructures for sensor monitoring data that can be used for public health.