 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Free Neural State Estimation in Nonlinear Dynamical Systems: A Comparative Study of Neural Architectures and Classical Filters
Jan 29, 2026Neural network models are increasingly used for state estimation in control and decision-making problems, yet it remains unclear to what extent they behave as principled filters in nonlinear dynamical systems. Unlike classical filters, which rely on explicit knowledge of system dynamics and noise models, neural estimators can be trained purely from data without access to the underlying system equations. In this work, we present a systematic empirical comparison between such model-free neural network models and classical filtering methods across multiple nonlinear scenarios. Our study evaluates Transformer-based models, state-space neural networks, and recurrent architectures alongside particle filters and nonlinear Kalman filters. The results show that neural models (in particular, state-space models (SSMs)) achieve state estimation performance that approaches strong nonlinear Kalman filters in nonlinear scenarios and outperform weaker classical baselines despite lacking access to system models, while also attaining substantially higher inference throughput.
Corrupting Data to Remove Deceptive Perturbation: Using Preprocessing Method to Improve System Robustness
Jan 05, 2022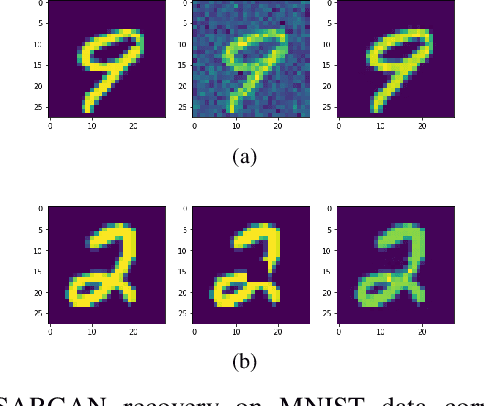
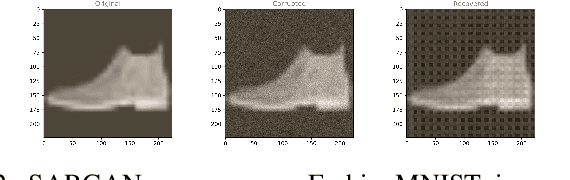
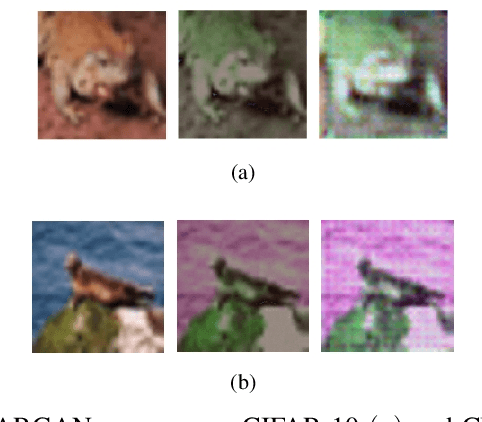
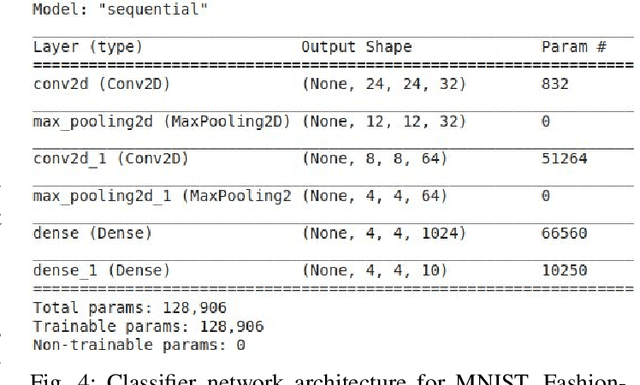
Although deep neural networks have achieved great performance on classification tasks, recent studies showed that well trained networks can be fooled by adding subtle noises. This paper introduces a new approach to improve neural network robustness by applying the recovery process on top of the naturally trained classifier. In this approach, images will be intentionally corrupted by some significant operator and then be recovered before passing through the classifiers. SARGAN -- an extension on Generative Adversarial Networks (GAN) is capable of denoising radar signals. This paper will show that SARGAN can also recover corrupted images by removing the adversarial effects. Our results show that this approach does improve the performance of naturally trained networks.