 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRe-imagining ISO 26262 in the Age of Autonomous Vehicles: Enhancing Controllability through Transferability and Predictability
Jun 05, 2026The ISO 26262 standard defines functional safety for road vehicles through risk assessments based on Severity, Exposure, and Controllability, grounded in a human-driven vehicle paradigm. In the context of autonomous vehicles (AVs), the absence of a human driver necessitates revisiting these principles. This paper decomposes the Controllability placeholder into two auditable evidence dimensions of ISO 26262 by introducing two measurable sub-concepts: Transferability and Predictability. Transferability extends Controllability to capture AV systems' ability to hand off control to dedicated fallback safety mechanisms, while Predictability captures how easily external agents can anticipate AV behavior. Predictability is formally defined from human-robot interaction-inspired principles, and a mathematical framework is provided to quantify it. A designed-versus-achievable gap is introduced to distinguish architectural fallback claims from scene-conditioned achievable fallback capability. The proposed metrics align with ISO 26262 and ISO/PAS 21448 (SOTIF), rendering fallback and interaction claims falsifiable and traceable across ODD slices. These dimensions complement rather than replace existing standards, and the enhancements preserve the structure of ISO 26262 while extending its applicability to driverless automated systems operating at SAE Levels 4 and 5.
RECTOR: Priority-Aware Rule-Based Reranking for Compliance-Aware Autonomous Driving Trajectory Selection
May 24, 2026Autonomous driving stacks must pick one trajectory from a multi-modal candidate set; choosing by model confidence ignores safety, traffic-law, and comfort constraints. We present \textsc{RECTOR} (Rule-Enforced Constrained Trajectory Orchestrator), a post-generation reranking layer that scores candidates against a tiered rulebook (Safety~$\succ$~Legal~$\succ$~Road~$\succ$~Comfort) via differentiable proxies and a scene-conditioned applicability mechanism, then selects with a deterministic $\varepsilon$-lexicographic rule that preserves cross-tier priority by construction -- without retraining the predictor. On the Waymo Open Motion Dataset \texttt{validation\_interactive} split (43{,}219 augmented instances, $K{=}6$), under Protocol~B (28-rule proxy catalog, oracle applicability) rule-aware selection cuts Safety+Legal violations from 28.58\% to 20.42\% and Total from 40.32\% to 32.41\% versus confidence-only on the same candidates. A uniform-weight weighted-sum baseline matches binary compliance on this benchmark -- the empirical lift comes from rule-aware ranking, while the lexicographic guarantee is the structural differentiator no weight calibration can replicate. Under adversarial confidence corruption, confidence-only selection fails in 100\% of scenarios while both rule-aware selectors reject the injected mode in $\sim$96\%. All figures are proxy-evaluator results (not a safety certificate), open-loop, 5\,s horizon, U.S.\ rules, validation split.
Benchmarking local motion planners for navigation of mobile manipulators
Nov 03, 2022



There are various trajectory planners for mobile manipulators. It is often challenging to compare their performance under similar circumstances due to differences in hardware, dissimilarity of tasks and objectives, as well as uncertainties in measurements and operating environments. In this paper, we propose a simulation framework to evaluate the performance of the local trajectory planners to generate smooth, and dynamically and kinematically feasible trajectories for mobile manipulators in the same environment. We focus on local planners as they are key components that provide smooth trajectories while carrying a load, react to dynamic obstacles, and avoid collisions. We evaluate two prominent local trajectory planners, Dynamic-Window Approach (DWA) and Time Elastic Band (TEB) using the metrics that we introduce. Moreover, our software solution is applicable to any other local planners used in the Robot Operating System (ROS) framework, without additional programming effort.
Bayesian Optimization-based Nonlinear Adaptive PID Controller Design for Robust Mobile Manipulation
Jul 04, 2022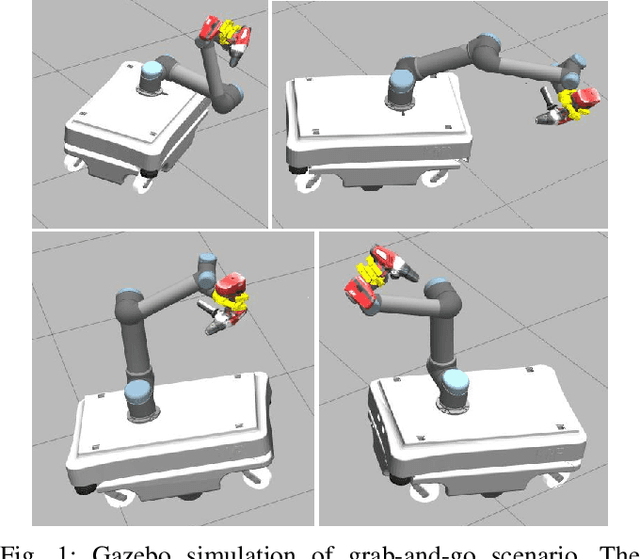
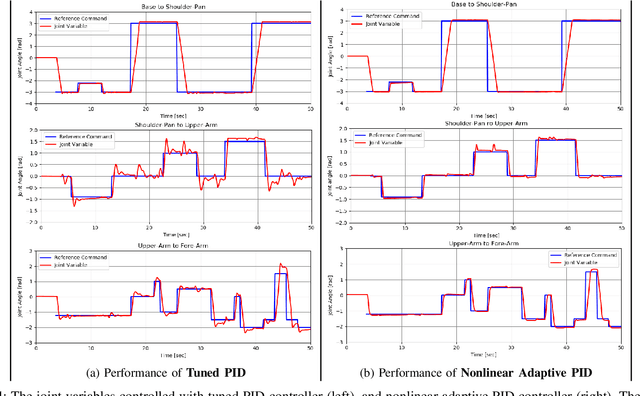
In this paper, we propose to use a nonlinear adaptive PID controller to regulate the joint variables of a mobile manipulator. The motion of the mobile base forces undue disturbances on the joint controllers of the manipulator. In designing a conventional PID controller, one should make a trade-off between the performance and agility of the closed-loop system and its stability margins. The proposed nonlinear adaptive PID controller provides a mechanism to relax the need for such a compromise by adapting the gains according to the magnitude of the error without expert tuning. Therefore, we can achieve agile performance for the system while seeing damped overshoot in the output and track the reference as close as possible, even in the presence of external disturbances and uncertainties in the modeling of the system. We have employed a Bayesian optimization approach to choose the parameters of a nonlinear adaptive PID controller to achieve the best performance in tracking the reference input and rejecting disturbances. The results demonstrate that a well-designed nonlinear adaptive PID controller can effectively regulate a mobile manipulator's joint variables while carrying an unspecified heavy load and an abrupt base movement occurs.