 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCTForensics: A Comprehensive Dataset and Method for AI-Generated CT Image Detection
Mar 02, 2026With the rapid development of generative AI in medical imaging, synthetic Computed Tomography (CT) images have demonstrated great potential in applications such as data augmentation and clinical diagnosis, but they also introduce serious security risks. Despite the increasing security concerns, existing studies on CT forgery detection are still limited and fail to adequately address real-world challenges. These limitations are mainly reflected in two aspects: the absence of datasets that can effectively evaluate model generalization to reflect the real-world application requirements, and the reliance on detection methods designed for natural images that are insensitive to CT-specific forgery artifacts. In this view, we propose CTForensics, a comprehensive dataset designed to systematically evaluate the generalization capability of CT forgery detection methods, which includes ten diverse CT generative methods. Moreover, we introduce the Enhanced Spatial-Frequency CT Forgery Detector (ESF-CTFD), an efficient CNN-based neural network that captures forgery cues across the wavelet, spatial, and frequency domains. First, it transforms the input CT image into three scales and extracts features at each scale via the Wavelet-Enhanced Central Stem. Then, starting from the largest-scale features, the Spatial Process Block gradually performs feature fusion with the smaller-scale ones. Finally, the Frequency Process Block learns frequency-domain information for predicting the final results. Experiments demonstrate that ESF-CTFD consistently outperforms existing methods and exhibits superior generalization across different CT generative models.
Fine-Grained Representation for Lane Topology Reasoning
Nov 18, 2025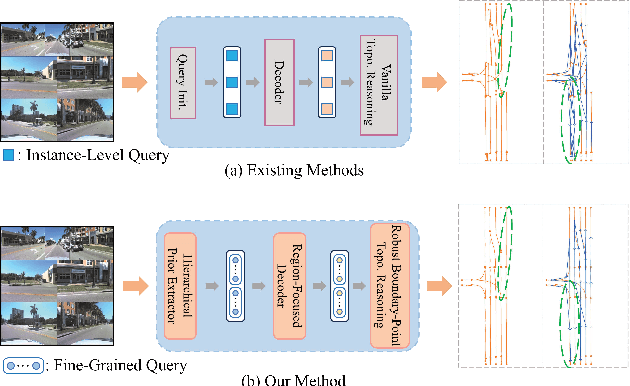
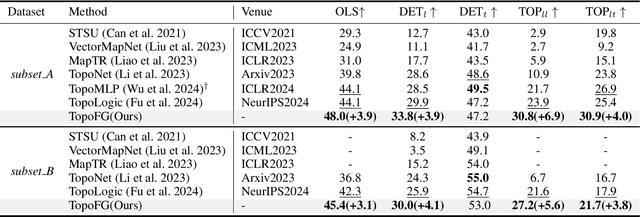
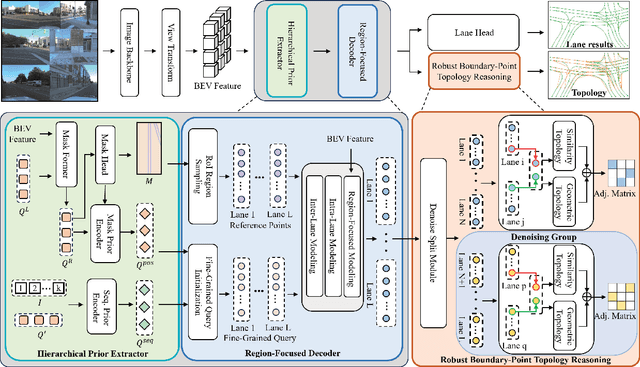
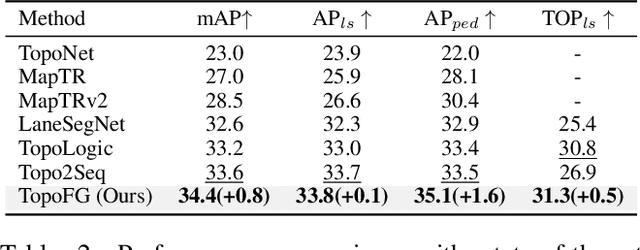
Precise modeling of lane topology is essential for autonomous driving, as it directly impacts navigation and control decisions. Existing methods typically represent each lane with a single query and infer topological connectivity based on the similarity between lane queries. However, this kind of design struggles to accurately model complex lane structures, leading to unreliable topology prediction. In this view, we propose a Fine-Grained lane topology reasoning framework (TopoFG). It divides the procedure from bird's-eye-view (BEV) features to topology prediction via fine-grained queries into three phases, i.e., Hierarchical Prior Extractor (HPE), Region-Focused Decoder (RFD), and Robust Boundary-Point Topology Reasoning (RBTR). Specifically, HPE extracts global spatial priors from the BEV mask and local sequential priors from in-lane keypoint sequences to guide subsequent fine-grained query modeling. RFD constructs fine-grained queries by integrating the spatial and sequential priors. It then samples reference points in RoI regions of the mask and applies cross-attention with BEV features to refine the query representations of each lane. RBTR models lane connectivity based on boundary-point query features and further employs a topological denoising strategy to reduce matching ambiguity. By integrating spatial and sequential priors into fine-grained queries and applying a denoising strategy to boundary-point topology reasoning, our method precisely models complex lane structures and delivers trustworthy topology predictions. Extensive experiments on the OpenLane-V2 benchmark demonstrate that TopoFG achieves new state-of-the-art performance, with an OLS of 48.0 on subsetA and 45.4 on subsetB.