 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability and L2-penalty in Model Averaging
Nov 23, 2023Model averaging has received much attention in the past two decades, which integrates available information by averaging over potential models. Although various model averaging methods have been developed, there are few literatures on the theoretical properties of model averaging from the perspective of stability, and the majority of these methods constrain model weights to a simplex. The aim of this paper is to introduce stability from statistical learning theory into model averaging. Thus, we define the stability, asymptotic empirical risk minimizer, generalization, and consistency of model averaging and study the relationship among them. Our results indicate that stability can ensure that model averaging has good generalization performance and consistency under reasonable conditions, where consistency means model averaging estimator can asymptotically minimize the mean squared prediction error. We also propose a L2-penalty model averaging method without limiting model weights and prove that it has stability and consistency. In order to reduce the impact of tuning parameter selection, we use 10-fold cross-validation to select a candidate set of tuning parameters and perform a weighted average of the estimators of model weights based on estimation errors. The Monte Carlo simulation and an illustrative application demonstrate the usefulness of the proposed method.
Research on Optimization Method of Multi-scale Fish Target Fast Detection Network
Apr 11, 2021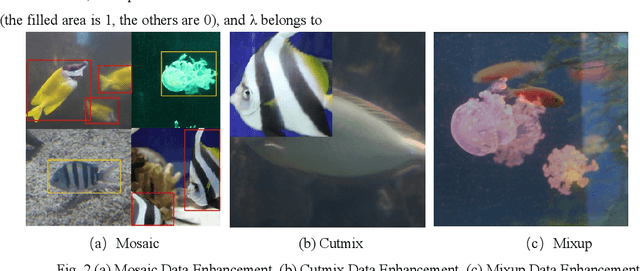
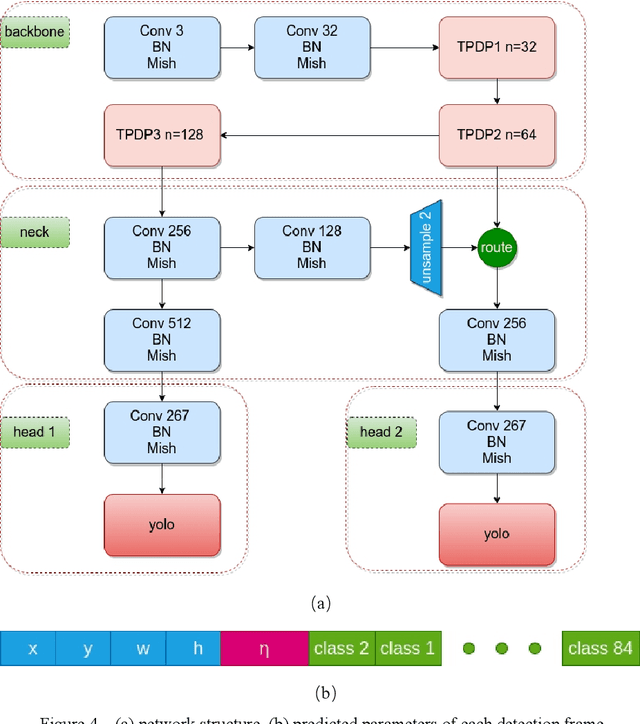
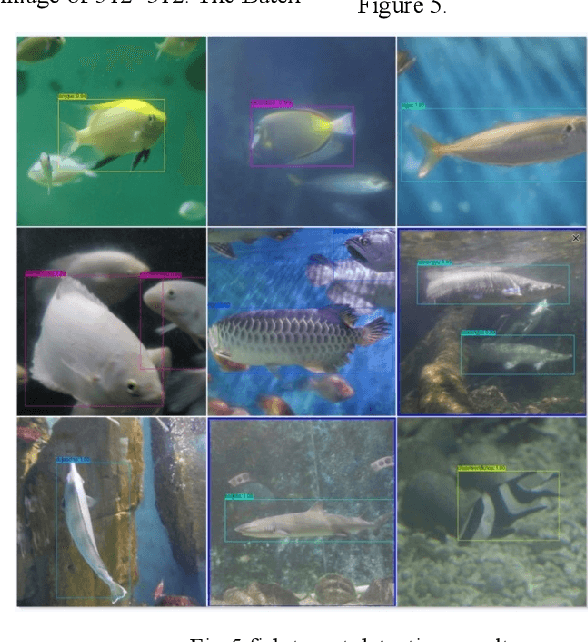
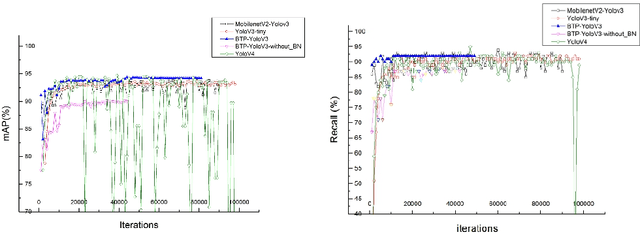
The fish target detection algorithm lacks a good quality data set, and the algorithm achieves real-time detection with lower power consumption on embedded devices, and it is difficult to balance the calculation speed and identification ability. To this end, this paper collected and annotated a data set named "Aquarium Fish" of 84 fishes containing 10042 images, and based on this data set, proposed a multi-scale input fast fish target detection network (BTP-yoloV3) and its optimization method. The experiment uses Depthwise convolution to redesign the backbone of the yoloV4 network, which reduces the amount of calculation by 94.1%, and the test accuracy is 92.34%. Then, the training model is enhanced with MixUp, CutMix, and mosaic to increase the test accuracy by 1.27%; Finally, use the mish, swish, and ELU activation functions to increase the test accuracy by 0.76%. As a result, the accuracy of testing the network with 2000 fish images reached 94.37%, and the computational complexity of the network BFLOPS was only 5.47. Comparing the YoloV3~4, MobileNetV2-yoloV3, and YoloV3-tiny networks of migration learning on this data set. The results show that BTP-Yolov3 has smaller model parameters, faster calculation speed, and lower energy consumption during operation while ensuring the calculation accuracy. It provides a certain reference value for the practical application of neural network.