 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigitizing Touch with an Artificial Multimodal Fingertip
Nov 04, 2024



Touch is a crucial sensing modality that provides rich information about object properties and interactions with the physical environment. Humans and robots both benefit from using touch to perceive and interact with the surrounding environment (Johansson and Flanagan, 2009; Li et al., 2020; Calandra et al., 2017). However, no existing systems provide rich, multi-modal digital touch-sensing capabilities through a hemispherical compliant embodiment. Here, we describe several conceptual and technological innovations to improve the digitization of touch. These advances are embodied in an artificial finger-shaped sensor with advanced sensing capabilities. Significantly, this fingertip contains high-resolution sensors (~8.3 million taxels) that respond to omnidirectional touch, capture multi-modal signals, and use on-device artificial intelligence to process the data in real time. Evaluations show that the artificial fingertip can resolve spatial features as small as 7 um, sense normal and shear forces with a resolution of 1.01 mN and 1.27 mN, respectively, perceive vibrations up to 10 kHz, sense heat, and even sense odor. Furthermore, it embeds an on-device AI neural network accelerator that acts as a peripheral nervous system on a robot and mimics the reflex arc found in humans. These results demonstrate the possibility of digitizing touch with superhuman performance. The implications are profound, and we anticipate potential applications in robotics (industrial, medical, agricultural, and consumer-level), virtual reality and telepresence, prosthetics, and e-commerce. Toward digitizing touch at scale, we open-source a modular platform to facilitate future research on the nature of touch.
Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors
Mar 12, 2024



Vision-based tactile sensors have recently become popular due to their combination of low cost, very high spatial resolution, and ease of integration using widely available miniature cameras. The associated field of view and focal length, however, are difficult to package in a human-sized finger. In this paper we employ optical fiber bundles to achieve a form factor that, at 15 mm diameter, is smaller than an average human fingertip. The electronics and camera are also located remotely, further reducing package size. The sensor achieves a spatial resolution of 0.22 mm and a minimum force resolution 5 mN for normal and shear contact forces. With these attributes, the DIGIT Pinki sensor is suitable for applications such as robotic and teleoperated digital palpation. We demonstrate its utility for palpation of the prostate gland and show that it can achieve clinically relevant discrimination of prostate stiffness for phantom and ex vivo tissue.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
May 29, 2020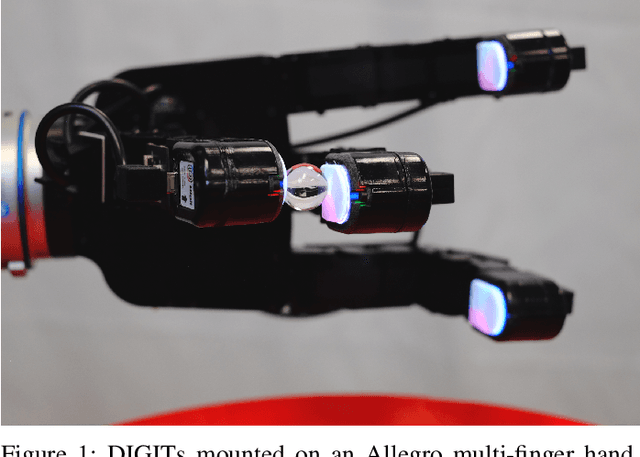
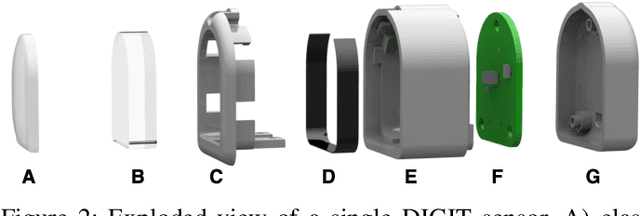

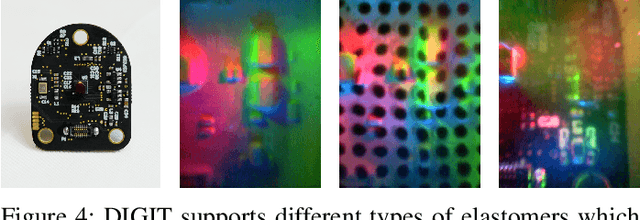
Despite decades of research, general purpose in-hand manipulation remains one of the unsolved challenges of robotics. One of the contributing factors that limit current robotic manipulation systems is the difficulty of precisely sensing contact forces -- sensing and reasoning about contact forces are crucial to accurately control interactions with the environment. As a step towards enabling better robotic manipulation, we introduce DIGIT, an inexpensive, compact, and high-resolution tactile sensor geared towards in-hand manipulation. DIGIT improves upon past vision-based tactile sensors by miniaturizing the form factor to be mountable on multi-fingered hands, and by providing several design improvements that result in an easier, more repeatable manufacturing process, and enhanced reliability. We demonstrate the capabilities of the DIGIT sensor by training deep neural network model-based controllers to manipulate glass marbles in-hand with a multi-finger robotic hand. To provide the robotic community access to reliable and low-cost tactile sensors, we open-source the DIGIT design at https://digit.ml/.