 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving sub-seasonal wind-speed forecasts in Europe with a non-linear model
Nov 28, 2024Sub-seasonal wind speed forecasts provide valuable guidance for wind power system planning and operations, yet the forecasting skills of surface winds decrease sharply after two weeks. However, large-scale variables exhibit greater predictability on this time scale. This study explores the potential of leveraging non-linear relationships between 500 hPa geopotential height (Z500) and surface wind speed to improve subs-seasonal wind speed forecasting skills in Europe. Our proposed framework uses a Multiple Linear Regression (MLR) or a Convolutional Neural Network (CNN) to regress surface wind speed from Z500. Evaluations on ERA5 reanalysis indicate that the CNN performs better due to their non-linearity. Applying these models to sub-seasonal forecasts from the European Centre for Medium-Range Weather Forecasts, various verification metrics demonstrate the advantages of non-linearity. Yet, this is partly explained by the fact that these statistical models are under-dispersive since they explain only a fraction of the target variable variance. Introducing stochastic perturbations to represent the stochasticity of the unexplained part from the signal helps compensate for this issue. Results show that the perturbed CNN performs better than the perturbed MLR only in the first weeks, while the perturbed MLR's performance converges towards that of the perturbed CNN after two weeks. The study finds that introducing stochastic perturbations can address the issue of insufficient spread in these statistical models, with improvements from the non-linearity varying with the lead time of the forecasts.
Temporal and Spatial Online Integrated Calibration for Camera and LiDAR
Jul 21, 2022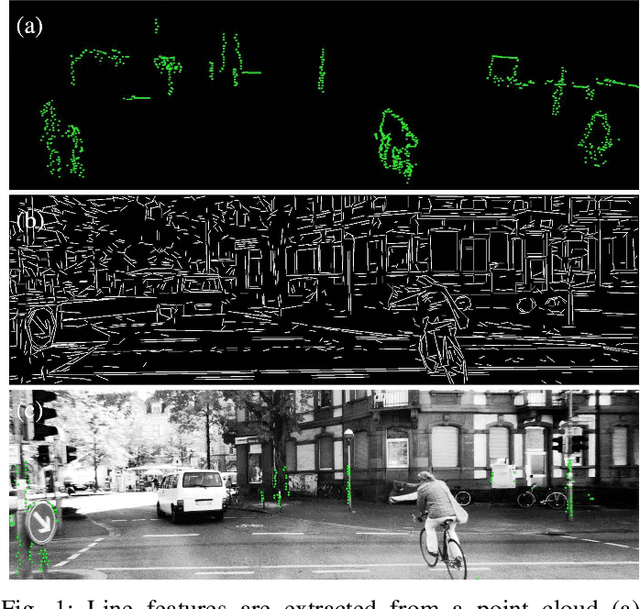
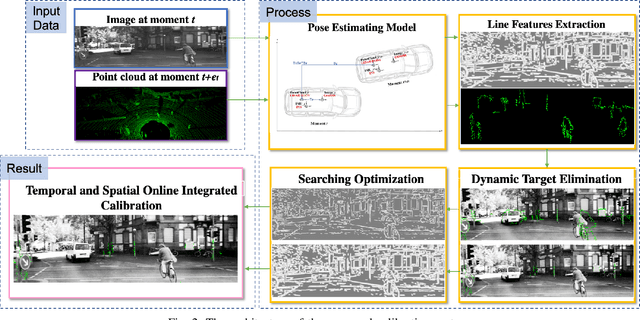
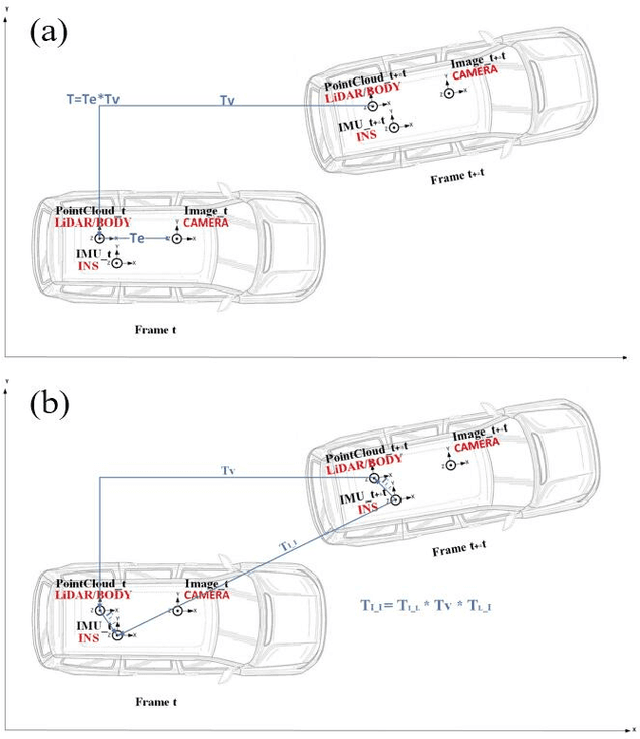
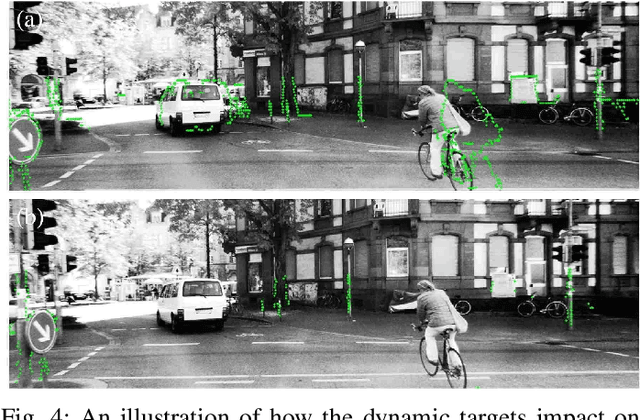
While camera and LiDAR are widely used in most of the assisted and autonomous driving systems, only a few works have been proposed to associate the temporal synchronization and extrinsic calibration for camera and LiDAR which are dedicated to online sensors data fusion. The temporal and spatial calibration technologies are facing the challenges of lack of relevance and real-time. In this paper, we introduce the pose estimation model and environmental robust line features extraction to improve the relevance of data fusion and instant online ability of correction. Dynamic targets eliminating aims to seek optimal policy considering the correspondence of point cloud matching between adjacent moments. The searching optimization process aims to provide accurate parameters with both computation accuracy and efficiency. To demonstrate the benefits of this method, we evaluate it on the KITTI benchmark with ground truth value. In online experiments, our approach improves the accuracy by 38.5\% than the soft synchronization method in temporal calibration. While in spatial calibration, our approach automatically corrects disturbance errors within 0.4 second and achieves an accuracy of 0.3-degree. This work can promote the research and application of sensor fusion.
Convolutional Neural Network Modelling for MODIS Land Surface Temperature Super-Resolution
Apr 01, 2022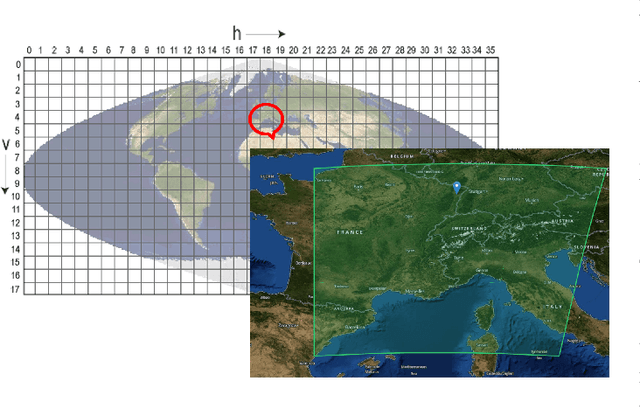
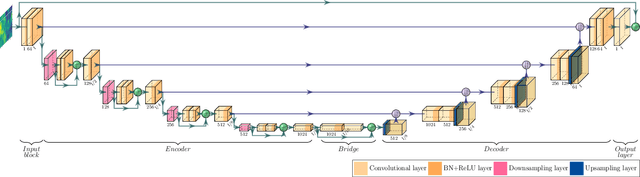
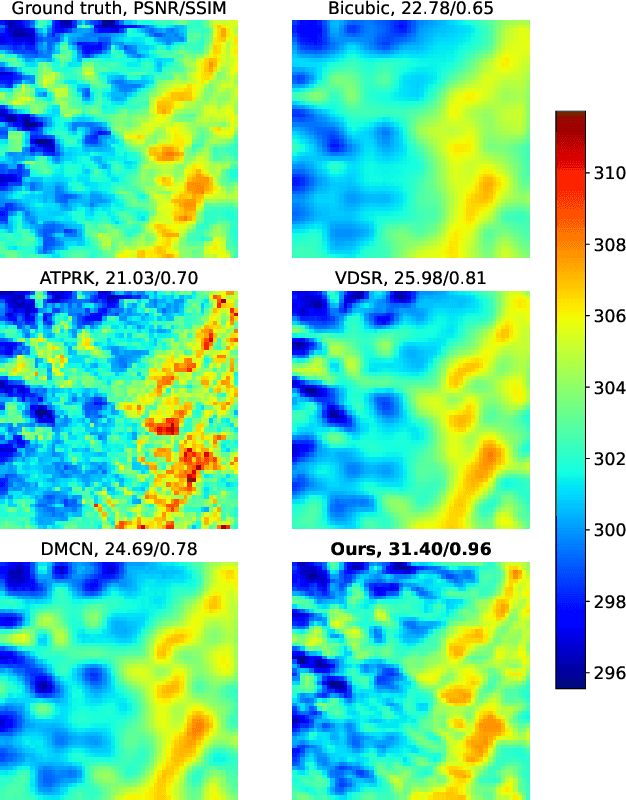
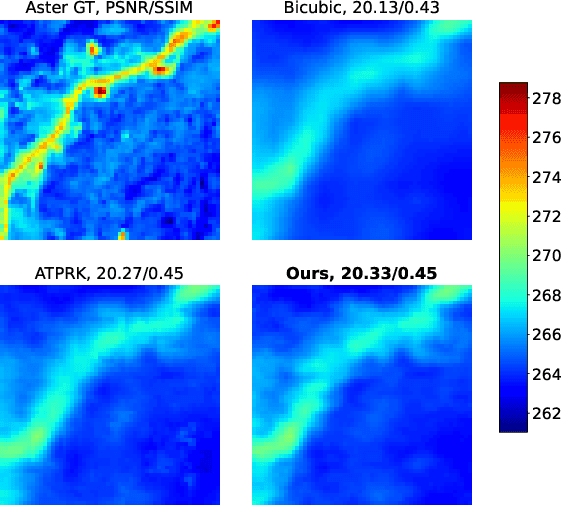
Nowadays, thermal infrared satellite remote sensors enable to extract very interesting information at large scale, in particular Land Surface Temperature (LST). However such data are limited in spatial and/or temporal resolutions which prevents from an analysis at fine scales. For example, MODIS satellite provides daily acquisitions with 1Km spatial resolutions which is not sufficient to deal with highly heterogeneous environments as agricultural parcels. Therefore, image super-resolution is a crucial task to better exploit MODIS LSTs. This issue is tackled in this paper. We introduce a deep learning-based algorithm, named Multi-residual U-Net, for super-resolution of MODIS LST single-images. Our proposed network is a modified version of U-Net architecture, which aims at super-resolving the input LST image from 1Km to 250m per pixel. The results show that our Multi-residual U-Net outperforms other state-of-the-art methods.
Enhancing the Diversity of Predictions Combination by Negative Correlation Learning
Apr 06, 2021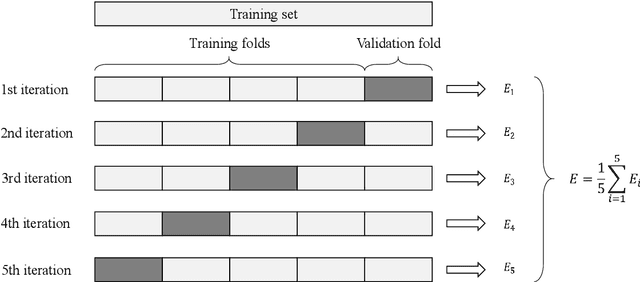

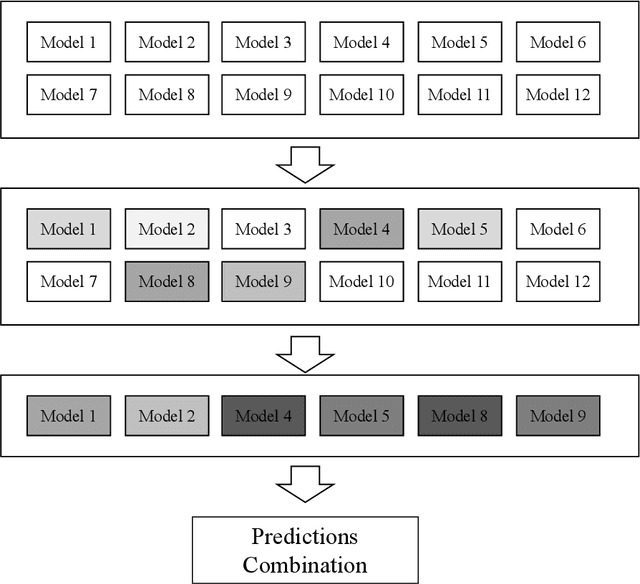
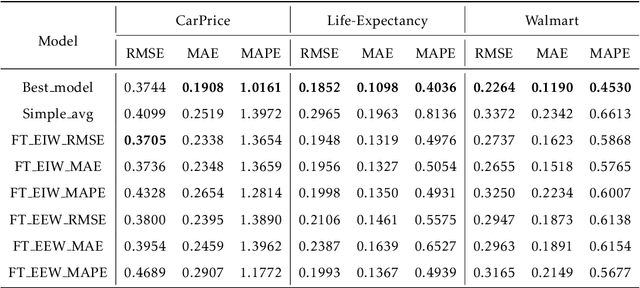
Predictions combination, as a combination model approach with adjustments in the output space, has flourished in recent years in research and competitions. Simple average is intuitive and robust, and is often used as a benchmark in predictions combination. However, some poorly performing sub-models can reduce the overall accuracy because the sub-models are not selected in advance. Even though some studies have selected the top sub-models for the combination after ranking them by mean square error, the covariance of them causes this approach to not yield much benefit. In this paper, we suggest to consider the diversity of sub-models in the predictions combination, which can be adopted to assist in selecting the most diverse model subset in the model pool using negative correlation learning. Three publicly available datasets are applied to evaluate the approach. The experimental results not only show the diversity of sub-models in the predictions combination incorporating negative correlation learning, but also produce predictions with accuracy far exceeding that of the simple average benchmark and some weighted average methods. Furthermore, by adjusting the penalty strength for negative correlation, the predictions combination also outperform the best sub-model. The value of this paper lies in its ease of use and effectiveness, allowing the predictions combination to embrace both diversity and accuracy.