 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Assessing the Relevance of Code Reviews Authored by Generative Models
Dec 17, 2025

The use of large language models like ChatGPT in code review offers promising efficiency gains but also raises concerns about correctness and safety. Existing evaluation methods for code review generation either rely on automatic comparisons to a single ground truth, which fails to capture the variability of human perspectives, or on subjective assessments of "usefulness", a highly ambiguous concept. We propose a novel evaluation approach based on what we call multi-subjective ranking. Using a dataset of 280 self-contained code review requests and corresponding comments from CodeReview StackExchange, multiple human judges ranked the quality of ChatGPT-generated comments alongside the top human responses from the platform. Results show that ChatGPT's comments were ranked significantly better than human ones, even surpassing StackExchange's accepted answers. Going further, our proposed method motivates and enables more meaningful assessments of generative AI's performance in code review, while also raising awareness of potential risks of unchecked integration into review processes.
Previously on... Automating Code Review
Aug 25, 2025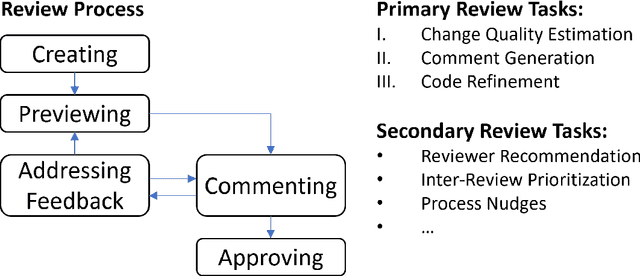
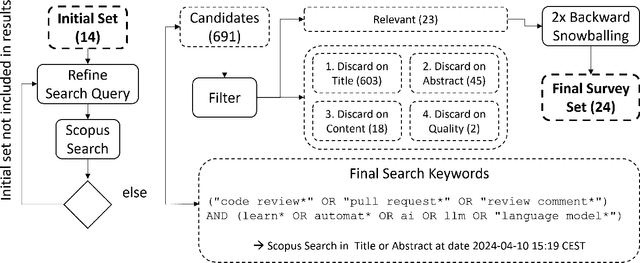
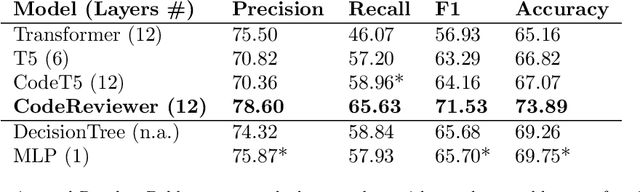
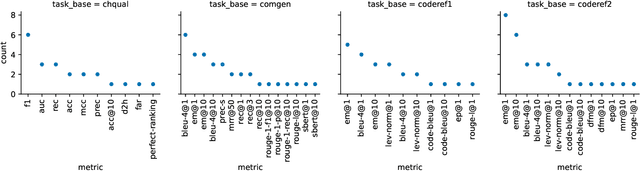
Modern Code Review (MCR) is a standard practice in software engineering, yet it demands substantial time and resource investments. Recent research has increasingly explored automating core review tasks using machine learning (ML) and deep learning (DL). As a result, there is substantial variability in task definitions, datasets, and evaluation procedures. This study provides the first comprehensive analysis of MCR automation research, aiming to characterize the field's evolution, formalize learning tasks, highlight methodological challenges, and offer actionable recommendations to guide future research. Focusing on the primary code review tasks, we systematically surveyed 691 publications and identified 24 relevant studies published between May 2015 and April 2024. Each study was analyzed in terms of tasks, models, metrics, baselines, results, validity concerns, and artifact availability. In particular, our analysis reveals significant potential for standardization, including 48 task metric combinations, 22 of which were unique to their original paper, and limited dataset reuse. We highlight challenges and derive concrete recommendations for examples such as the temporal bias threat, which are rarely addressed so far. Our work contributes to a clearer overview of the field, supports the framing of new research, helps to avoid pitfalls, and promotes greater standardization in evaluation practices.
Towards Transformer-based Homogenization of Satellite Imagery for Landsat-8 and Sentinel-2
Oct 14, 2022
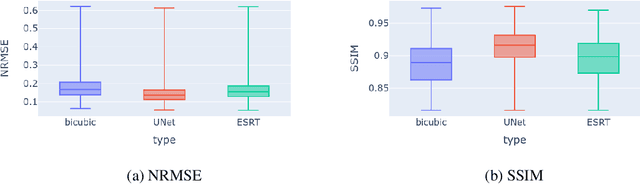
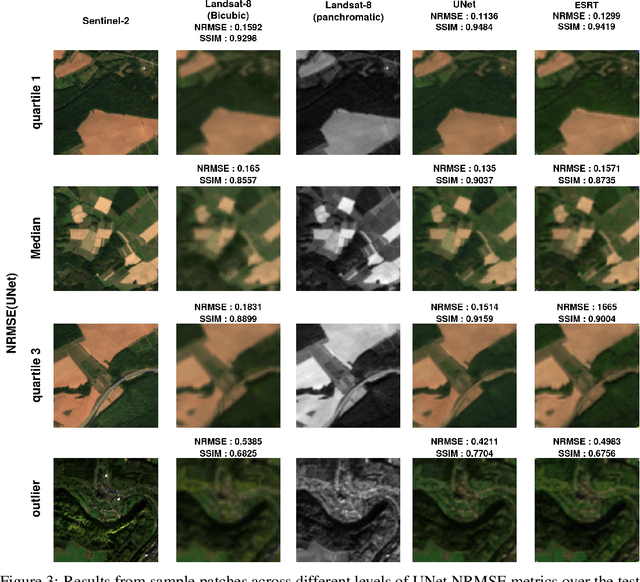
Landsat-8 (NASA) and Sentinel-2 (ESA) are two prominent multi-spectral imaging satellite projects that provide publicly available data. The multi-spectral imaging sensors of the satellites capture images of the earth's surface in the visible and infrared region of the electromagnetic spectrum. Since the majority of the earth's surface is constantly covered with clouds, which are not transparent at these wavelengths, many images do not provide much information. To increase the temporal availability of cloud-free images of a certain area, one can combine the observations from multiple sources. However, the sensors of satellites might differ in their properties, making the images incompatible. This work provides a first glance at the possibility of using a transformer-based model to reduce the spectral and spatial differences between observations from both satellite projects. We compare the results to a model based on a fully convolutional UNet architecture. Somewhat surprisingly, we find that, while deep models outperform classical approaches, the UNet significantly outperforms the transformer in our experiments.
Addressing Randomness in Evaluation Protocols for Out-of-Distribution Detection
Mar 01, 2022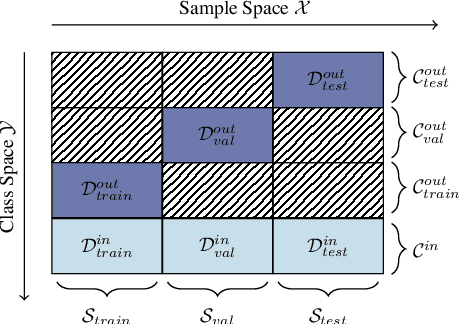
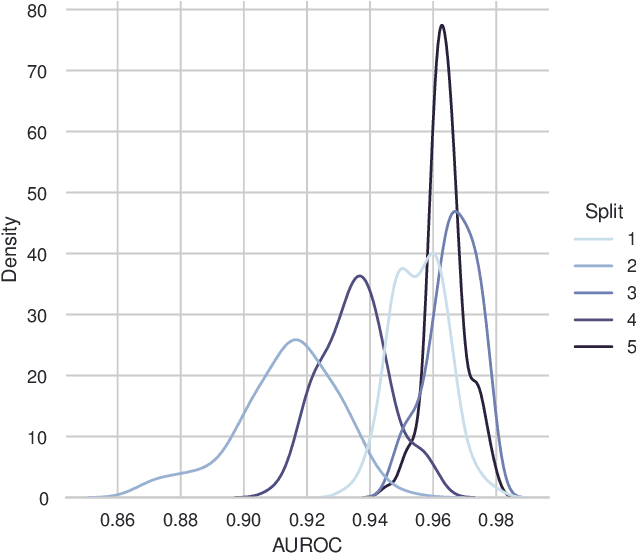
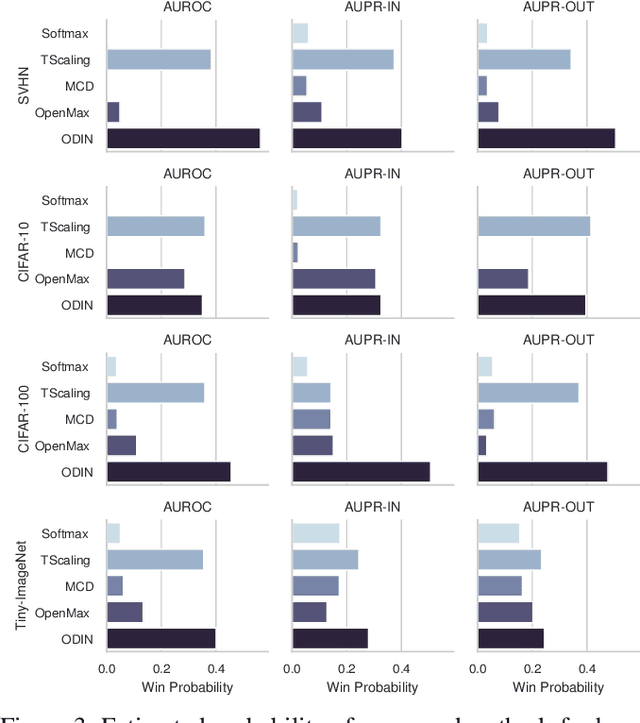
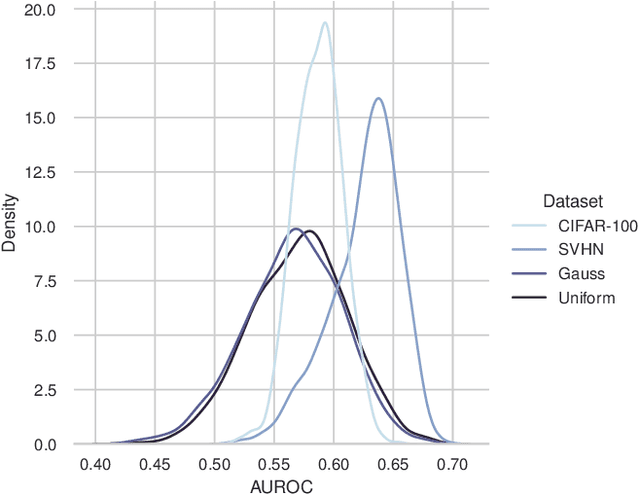
Deep Neural Networks for classification behave unpredictably when confronted with inputs not stemming from the training distribution. This motivates out-of-distribution detection (OOD) mechanisms. The usual lack of prior information on out-of-distribution data renders the performance estimation of detection approaches on unseen data difficult. Several contemporary evaluation protocols are based on open set simulations, which average the performance over up to five synthetic random splits of a dataset into in- and out-of-distribution samples. However, the number of possible splits may be much larger, and the performance of Deep Neural Networks is known to fluctuate significantly depending on different sources of random variation. We empirically demonstrate that current protocols may fail to provide reliable estimates of the expected performance of OOD methods. By casting this evaluation as a random process, we generalize the concept of open set simulations and propose to estimate the performance of OOD methods using a Monte Carlo approach that addresses the randomness.
Learning References with Gaussian Processes in Model Predictive Control applied to Robot Assisted Surgery
Nov 25, 2019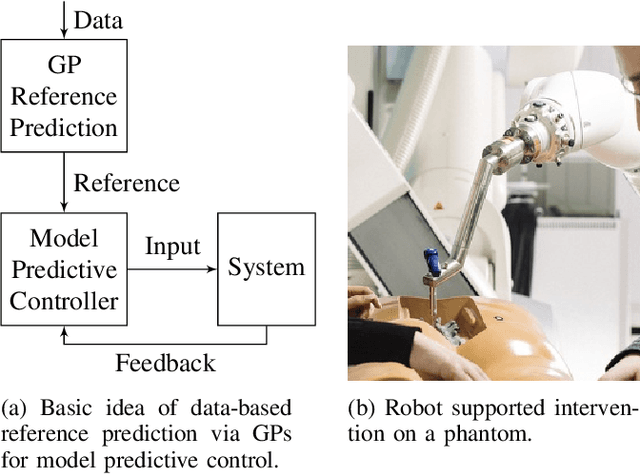
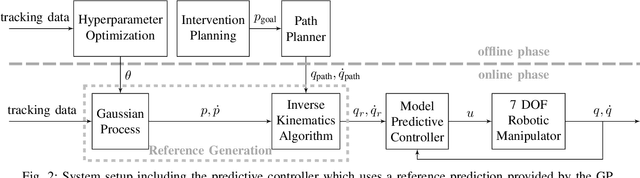
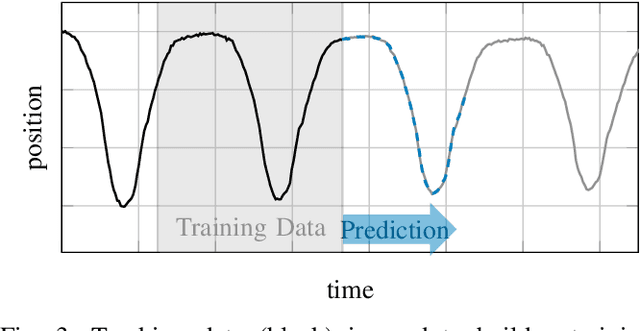
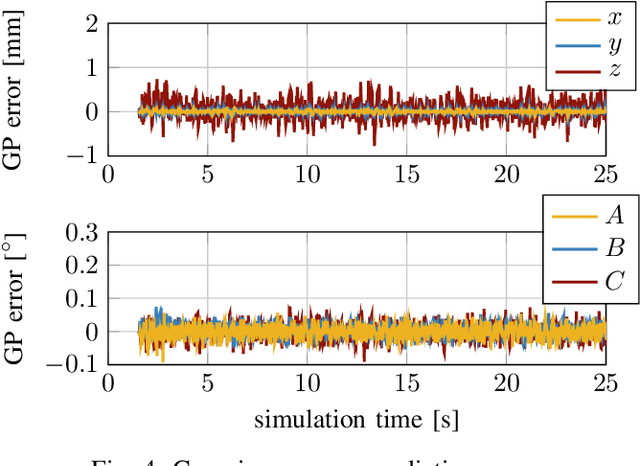
One of the key benefits of model predictive control is the capability of controlling a system proactively in the sense of taking the future system evolution into account. However, often external disturbances or references are not a priori known, which renders the predictive controllers shortsighted or uninformed. Adaptive prediction models can be used to overcome this issue and provide predictions of these signals to the controller. In this work we propose to learn references via Gaussian processes for model predictive controllers. To illustrate the approach, we consider robot assisted surgery, where a robotic manipulator needs to follow a learned reference position based on optical tracking measurements.