 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrailblazer: Learning offroad costmaps for long range planning
May 14, 2025Autonomous navigation in off-road environments remains a significant challenge in field robotics, particularly for Unmanned Ground Vehicles (UGVs) tasked with search and rescue, exploration, and surveillance. Effective long-range planning relies on the integration of onboard perception systems with prior environmental knowledge, such as satellite imagery and LiDAR data. This work introduces Trailblazer, a novel framework that automates the conversion of multi-modal sensor data into costmaps, enabling efficient path planning without manual tuning. Unlike traditional approaches, Trailblazer leverages imitation learning and a differentiable A* planner to learn costmaps directly from expert demonstrations, enhancing adaptability across diverse terrains. The proposed methodology was validated through extensive real-world testing, achieving robust performance in dynamic and complex environments, demonstrating Trailblazer's potential for scalable, efficient autonomous navigation.
How Does It Feel? Self-Supervised Costmap Learning for Off-Road Vehicle Traversability
Sep 22, 2022
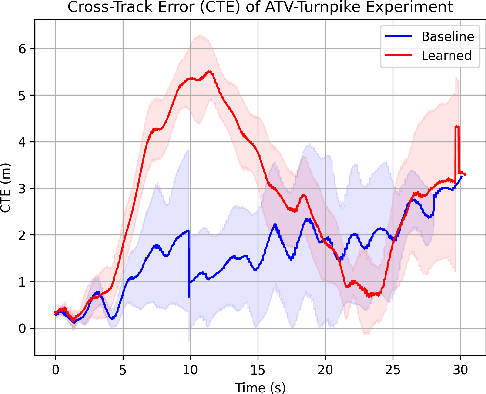
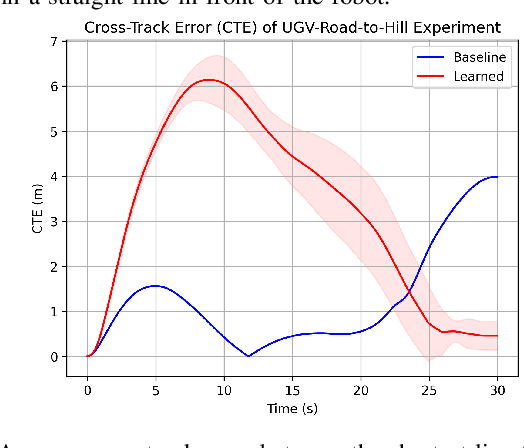
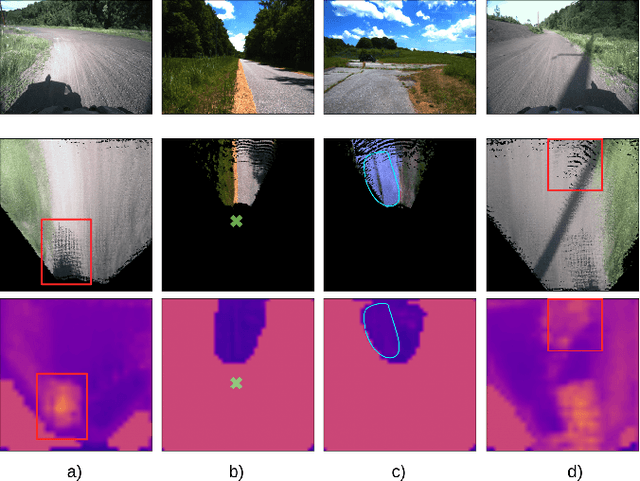
Estimating terrain traversability in off-road environments requires reasoning about complex interaction dynamics between the robot and these terrains. However, it is challenging to build an accurate physics model, or create informative labels to learn a model in a supervised manner, for these interactions. We propose a method that learns to predict traversability costmaps by combining exteroceptive environmental information with proprioceptive terrain interaction feedback in a self-supervised manner. Additionally, we propose a novel way of incorporating robot velocity in the costmap prediction pipeline. We validate our method in multiple short and large-scale navigation tasks on a large, autonomous all-terrain vehicle (ATV) on challenging off-road terrains, and demonstrate ease of integration on a separate large ground robot. Our short-scale navigation results show that using our learned costmaps leads to overall smoother navigation, and provides the robot with a more fine-grained understanding of the interactions between the robot and different terrain types, such as grass and gravel. Our large-scale navigation trials show that we can reduce the number of interventions by up to 57% compared to an occupancy-based navigation baseline in challenging off-road courses ranging from 400 m to 3150 m.