 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian-Augmented Physics Simulation and System Identification with Complex Colliders
Nov 10, 2025



System identification involving the geometry, appearance, and physical properties from video observations is a challenging task with applications in robotics and graphics. Recent approaches have relied on fully differentiable Material Point Method (MPM) and rendering for simultaneous optimization of these properties. However, they are limited to simplified object-environment interactions with planar colliders and fail in more challenging scenarios where objects collide with non-planar surfaces. We propose AS-DiffMPM, a differentiable MPM framework that enables physical property estimation with arbitrarily shaped colliders. Our approach extends existing methods by incorporating a differentiable collision handling mechanism, allowing the target object to interact with complex rigid bodies while maintaining end-to-end optimization. We show AS-DiffMPM can be easily interfaced with various novel view synthesis methods as a framework for system identification from visual observations.
Continuous Wrist Control on the Hannes Prosthesis: a Vision-based Shared Autonomy Framework
Feb 24, 2025



Most control techniques for prosthetic grasping focus on dexterous fingers control, but overlook the wrist motion. This forces the user to perform compensatory movements with the elbow, shoulder and hip to adapt the wrist for grasping. We propose a computer vision-based system that leverages the collaboration between the user and an automatic system in a shared autonomy framework, to perform continuous control of the wrist degrees of freedom in a prosthetic arm, promoting a more natural approach-to-grasp motion. Our pipeline allows to seamlessly control the prosthetic wrist to follow the target object and finally orient it for grasping according to the user intent. We assess the effectiveness of each system component through quantitative analysis and finally deploy our method on the Hannes prosthetic arm. Code and videos: https://hsp-iit.github.io/hannes-wrist-control.
Grasp Pre-shape Selection by Synthetic Training: Eye-in-hand Shared Control on the Hannes Prosthesis
Mar 18, 2022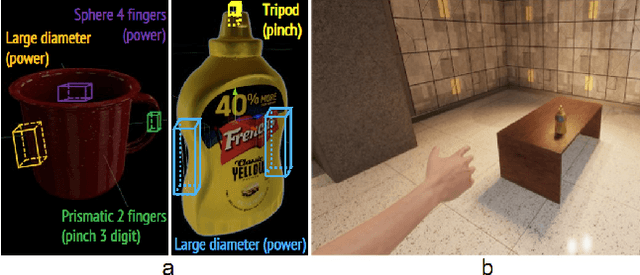

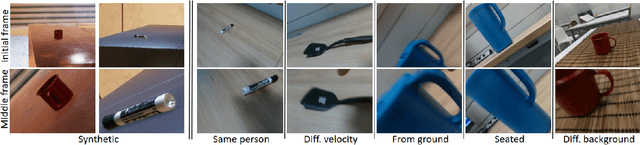
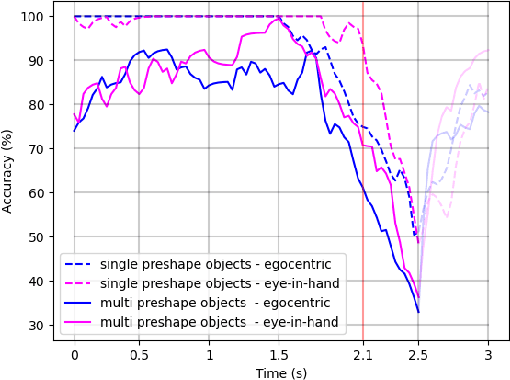
We consider the task of object grasping with a prosthetic hand capable of multiple grasp types. In this setting, communicating the intended grasp type often requires a high user cognitive load which can be reduced adopting shared autonomy frameworks. Among these, so-called eye-in-hand systems automatically control the hand aperture and pre-shaping before the grasp, based on visual input coming from a camera on the wrist. In this work, we present an eye-in-hand learning-based approach for hand pre-shape classification from RGB sequences. In order to reduce the need for tedious data collection sessions for training the system, we devise a pipeline for rendering synthetic visual sequences of hand trajectories for the purpose. We tackle the peculiarity of the eye-in-hand setting by means of a model for the human arm trajectories, with domain randomization over relevant visual elements. We develop a sensorized setup to acquire real human grasping sequences for benchmarking and show that, compared on practical use cases, models trained with our synthetic dataset achieve better generalization performance than models trained on real data. We finally integrate our model on the Hannes prosthetic hand and show its practical effectiveness. Our code, real and synthetic datasets will be released upon acceptance.