 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel-in-Time Nonlinear Optimal Control via GPU-native Sequential Convex Programming
Mar 12, 2026Real-time trajectory optimization for nonlinear constrained autonomous systems is critical and typically performed by CPU-based sequential solvers. Specifically, reliance on global sparse linear algebra or the serial nature of dynamic programming algorithms restricts the utilization of massively parallel computing architectures like GPUs. To bridge this gap, we introduce a fully GPU-native trajectory optimization framework that combines sequential convex programming with a consensus-based alternating direction method of multipliers. By applying a temporal splitting strategy, our algorithm decouples the optimization horizon into independent, per-node subproblems that execute massively in parallel. The entire process runs fully on the GPU, eliminating costly memory transfers and large-scale sparse factorizations. This architecture naturally scales to multi-trajectory optimization. We validate the solver on a quadrotor agile flight task and a Mars powered descent problem using an on-board edge computing platform. Benchmarks reveal a sustained 4x throughput speedup and a 51% reduction in energy consumption over a heavily optimized 12-core CPU baseline. Crucially, the framework saturates the hardware, maintaining over 96% active GPU utilization to achieve planning rates exceeding 100 Hz. Furthermore, we demonstrate the solver's extensibility to robust Model Predictive Control by jointly optimizing dynamically coupled scenarios under stochastic disturbances, enabling scalable and safe autonomy.
Analytical Shaping Method for Low-Thrust Rendezvous Trajectory Using Cubic Spline Functions
Jan 01, 2022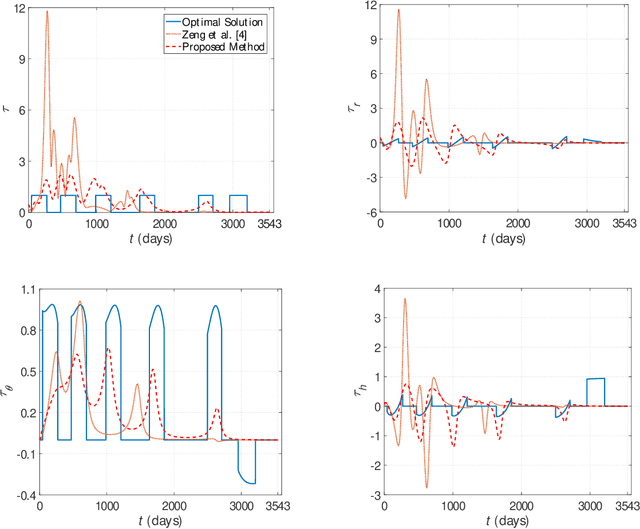
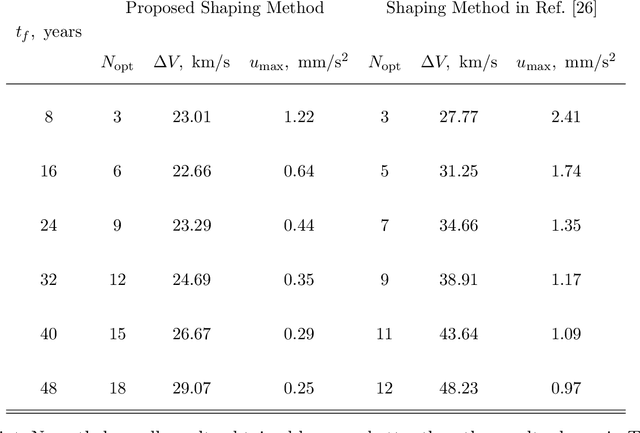
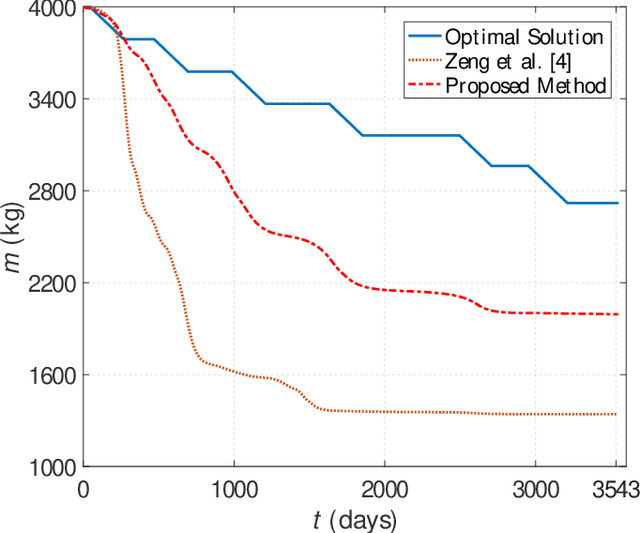
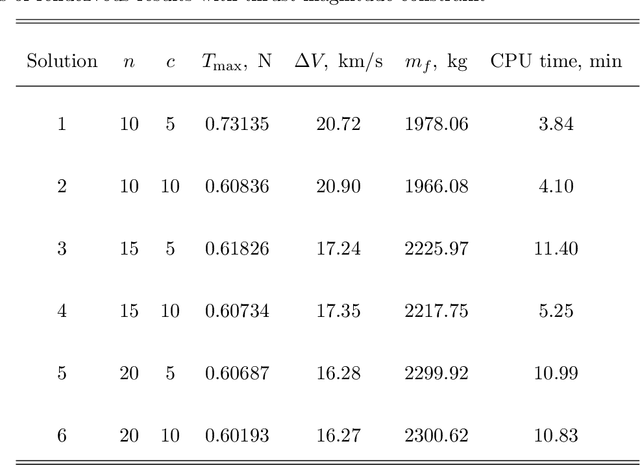
Preliminary mission design requires an efficient and accurate approximation to the low-thrust rendezvous trajectories, which might be generally three-dimensional and involve multiple revolutions. In this paper, a new shaping method using cubic spline functions is developed for the analytical approximation, which shows advantages in the optimality and computational efficiency. The rendezvous constraints on the boundary states and transfer time are all satisfied analytically, under the assumption that the boundary conditions and segment numbers of cubic spline functions are designated in advance. Two specific shapes are then formulated according to whether they have free optimization parameters. The shape without free parameters provides an efficient and robust estimation, while the other one allows a subsequent optimization for the satisfaction of additional constraints such as the constraint on the thrust magnitude. Applications of the proposed method in combination with the particle swarm optimization algorithm are discussed through two typical interplanetary rendezvous missions, that is, an inclined multi-revolution trajectory from the Earth to asteroid Dionysus and a multi-rendezvous trajectory of sample return. Simulation examples show that the proposed method is superior to existing methods in terms of providing good estimation for the global search and generating suitable initial guess for the subsequent trajectory optimization.