 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-based Optimization of Anguilliform Swimming Gaits for Soft Robotic Applications
Jun 09, 2026In this paper, we introduce the Soft Lamprey-Inspired Dual Environment Robot (SLIDER) and a proper modeling and optimization procedure employed to design the robot. We represent the primary fluid environment actions - inertial effects, vortex forces, and viscous dissipation - using Lighthill's theory for large-amplitude elongated bodies. For structural design parameters such as internal pressure, tail size, and body stiffness, a fast, geometrically and materially nonlinear model is developed and validated. The fluid-structure interaction equations are solved implicitly with an efficient second-order box method. A pneumatic manifold robotic system is employed to actuate SLIDER in a quiescent water tank environment, allowing cross-comparison of computational and experimental results. We find that low-frequency swimming is dominated by resistant environmental forces, whereas higher-frequency swimming is primarily affected by inertial fluid forces. Using our efficient model alongside a genetic algorithm, we co-optimize a swimming control pattern and caudal fin design (subject to SLIDER's climbing morphology) to achieve a tethered swimming speed of 21.7 +/- 0.4 cm/s (0.59 Bl/s). Furthermore, we investigate the optimization procedure for a multimodal robot performing both swimming and climbing tasks.
Modal-based Kinematics and Contact Detection of Soft Robots
Jun 27, 2019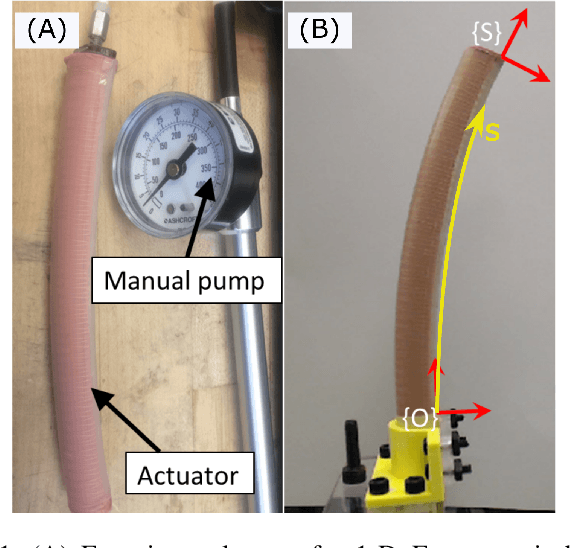
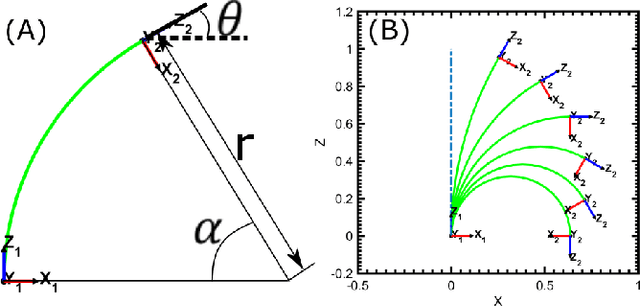
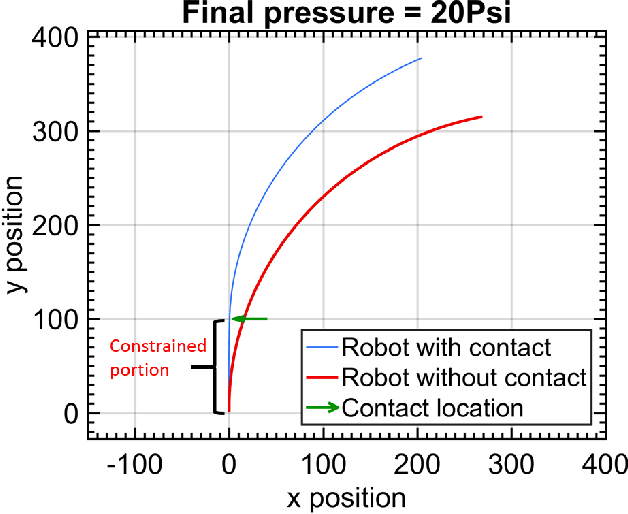
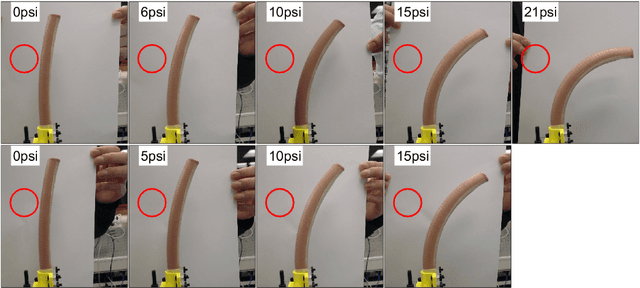
Soft robots offer an alternative approach to manipulate inside the constrained space while maintaining the safe interaction with the external environment. Due to its adaptable compliance characteristic, external contact force can easily deform the robot shapes and lead to undesired robot kinematic and dynamic properties. Accurate contact detection and contact position estimation are of critical importance for soft robot modeling, control, trajectory planning, and eventually affect the success of task completion. In this paper, we focus on the study of 1-DoF soft pneumatic bellow bending actuator, which is one of the fundamental components to construct complex, multi-DoF soft robots. This 1-DoF soft robot is modeled through the integral representation of the spacial curve. The direct and instantaneous kinematics are calculated explicitly through a modal method. The fixed centrode deviation (FCD) method is used to to detect the external contact and estimate contact location. Simulation results indicate that the contact location can be accurately estimated by solving a nonlinear least square optimization problem.