 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI and Collective Decisions: Strengthening Legitimacy and Losers' Consent
Apr 07, 2026AI is increasingly used to scale collective decision-making, but far less attention has been paid to how such systems can support procedural legitimacy, particularly the conditions shaping losers' consent: whether participants who do not get their preferred outcome still accept it as fair. We ask: (1) how can AI help ground collective decisions in participants' different experiences and beliefs, and (2) whether exposure to these experiences can increase trust, understanding, and social cohesion even when people disagree with the outcome. We built a system that uses a semi-structured AI interviewer to elicit personal experiences on policy topics and an interactive visualization that displays predicted policy support alongside those voiced experiences. In a randomized experiment (n = 181), interacting with the visualization increased perceived legitimacy, trust in outcomes, and understanding of others' perspectives, even though all participants encountered decisions that went against their stated preferences. Our hope is that the design and evaluation of this tool spurs future researchers to focus on how AI can help not only achieve scale and efficiency in democratic processes, but also increase trust and connection between participants.
Pedestrian Dominance Modeling for Socially-Aware Robot Navigation
Feb 13, 2019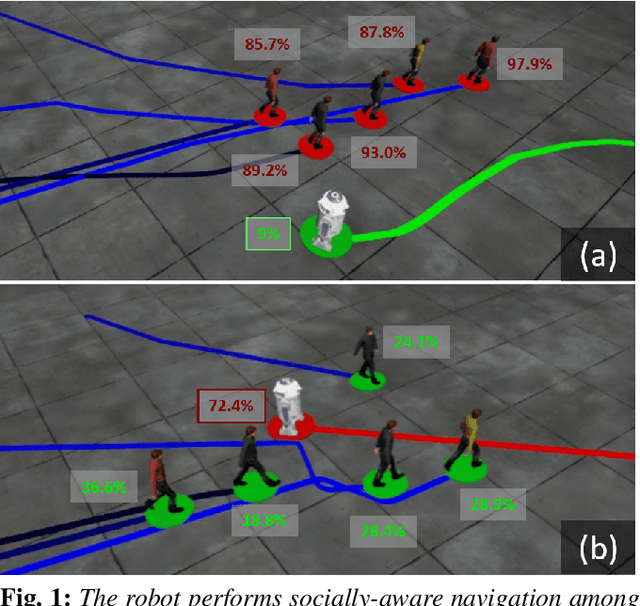
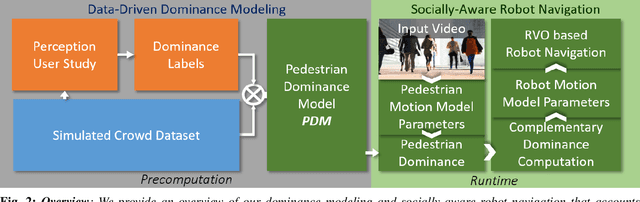
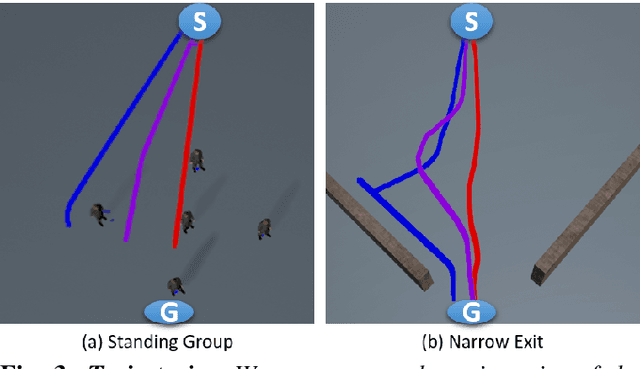
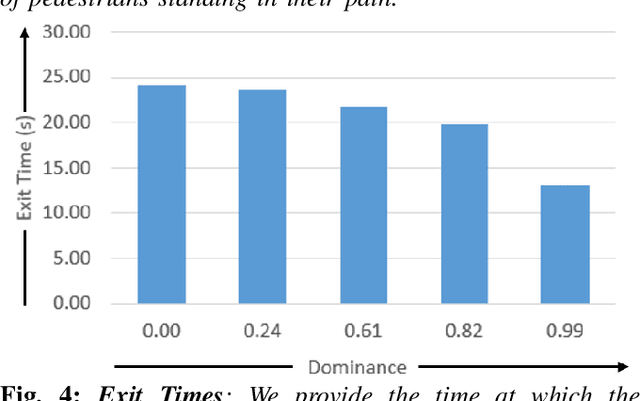
We present a Pedestrian Dominance Model (PDM) to identify the dominance characteristics of pedestrians for robot navigation. Through a perception study on a simulated dataset of pedestrians, PDM models the perceived dominance levels of pedestrians with varying motion behaviors corresponding to trajectory, speed, and personal space. At runtime, we use PDM to identify the dominance levels of pedestrians to facilitate socially-aware navigation for the robots. PDM can predict dominance levels from trajectories with ~85% accuracy. Prior studies in psychology literature indicate that when interacting with humans, people are more comfortable around people that exhibit complementary movement behaviors. Our algorithm leverages this by enabling the robots to exhibit complementing responses to pedestrian dominance. We also present an application of PDM for generating dominance-based collision-avoidance behaviors in the navigation of autonomous vehicles among pedestrians. We demonstrate the benefits of our algorithm for robots navigating among tens of pedestrians in simulated environments.
The Socially Invisible Robot: Navigation in the Social World using Robot Entitativity
Jul 18, 2018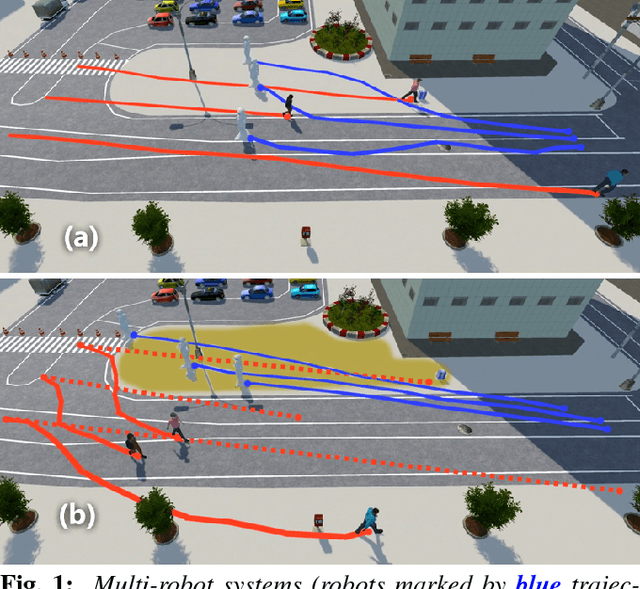
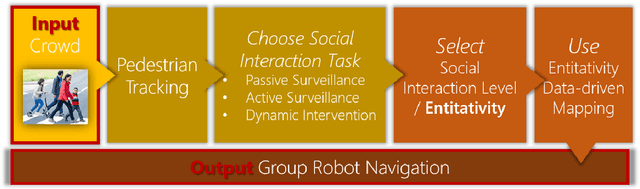
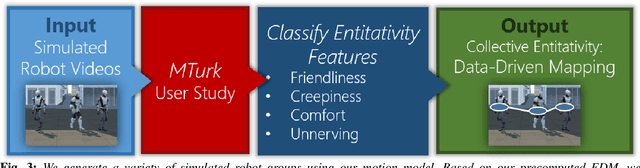
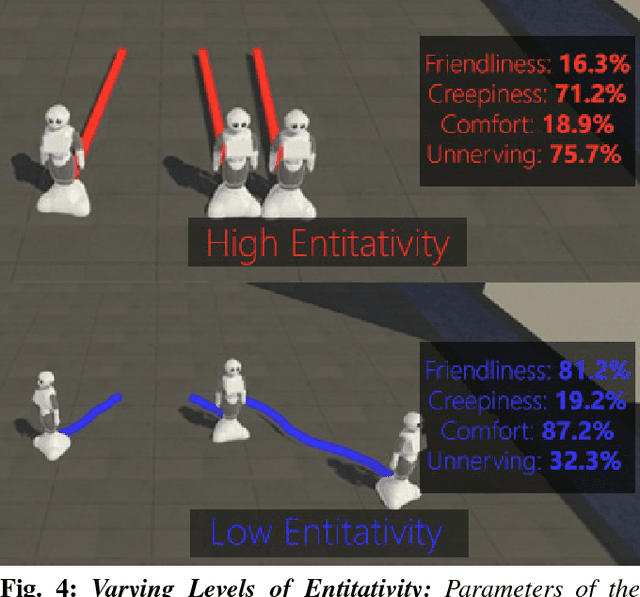
We present a real-time, data-driven algorithm to enhance the social-invisibility of robots within crowds. Our approach is based on prior psychological research, which reveals that people notice and--importantly--react negatively to groups of social actors when they have high entitativity, moving in a tight group with similar appearances and trajectories. In order to evaluate that behavior, we performed a user study to develop navigational algorithms that minimize entitativity. This study establishes a mapping between emotional reactions and multi-robot trajectories and appearances and further generalizes the finding across various environmental conditions. We demonstrate the applicability of our entitativity modeling for trajectory computation for active surveillance and dynamic intervention in simulated robot-human interaction scenarios. Our approach empirically shows that various levels of entitative robots can be used to both avoid and influence pedestrians while not eliciting strong emotional reactions, giving multi-robot systems socially-invisibility.
Identifying Driver Behaviors using Trajectory Features for Vehicle Navigation
Mar 16, 2018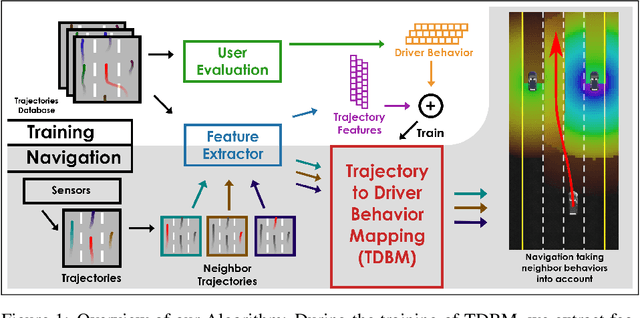
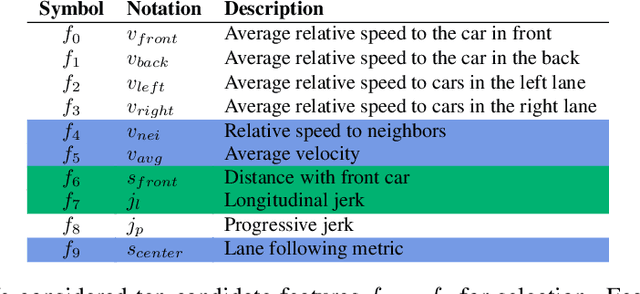
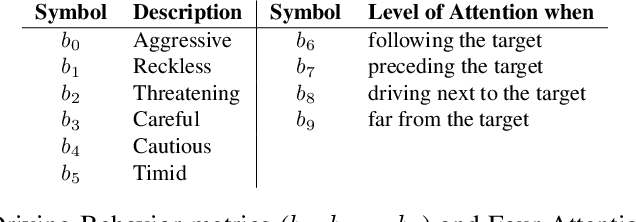
We present a novel approach to automatically identify driver behaviors from vehicle trajectories and use them for safe navigation of autonomous vehicles. We propose a novel set of features that can be easily extracted from car trajectories. We derive a data-driven mapping between these features and six driver behaviors using an elaborate web-based user study. We also compute a summarized score indicating a level of awareness that is needed while driving next to other vehicles. We also incorporate our algorithm into a vehicle navigation simulation system and demonstrate its benefits in terms of safer real-time navigation, while driving next to aggressive or dangerous drivers.