 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShaping Expressiveness in Robotics: The Role of Design Tools in Crafting Embodied Robot Movements
Feb 04, 2026As robots increasingly become part of shared human spaces, their movements must transcend basic functionality by incorporating expressive qualities to enhance engagement and communication. This paper introduces a movement-centered design pedagogy designed to support engineers in creating expressive robotic arm movements. Through a hands-on interactive workshop informed by interdisciplinary methodologies, participants explored various creative possibilities, generating valuable insights into expressive motion design. The iterative approach proposed integrates analytical frameworks from dance, enabling designers to examine motion through dynamic and embodied dimensions. A custom manual remote controller facilitates interactive, real-time manipulation of the robotic arm, while dedicated animation software supports visualization, detailed motion sequencing, and precise parameter control. Qualitative analysis of this interactive design process reveals that the proposed "toolbox" effectively bridges the gap between human intent and robotic expressiveness resulting in more intuitive and engaging expressive robotic arm movements.
What Can Robots Teach Us About Trust and Reliance? An interdisciplinary dialogue between Social Sciences and Social Robotics
Jul 17, 2025As robots find their way into more and more aspects of everyday life, questions around trust are becoming increasingly important. What does it mean to trust a robot? And how should we think about trust in relationships that involve both humans and non-human agents? While the field of Human-Robot Interaction (HRI) has made trust a central topic, the concept is often approached in fragmented ways. At the same time, established work in sociology, where trust has long been a key theme, is rarely brought into conversation with developments in robotics. This article argues that we need a more interdisciplinary approach. By drawing on insights from both social sciences and social robotics, we explore how trust is shaped, tested and made visible. Our goal is to open up a dialogue between disciplines and help build a more grounded and adaptable framework for understanding trust in the evolving world of human-robot interaction.
Trust as indicator of robot functional and social acceptance. An experimental study on user conformation to the iCub's answers
Oct 13, 2015



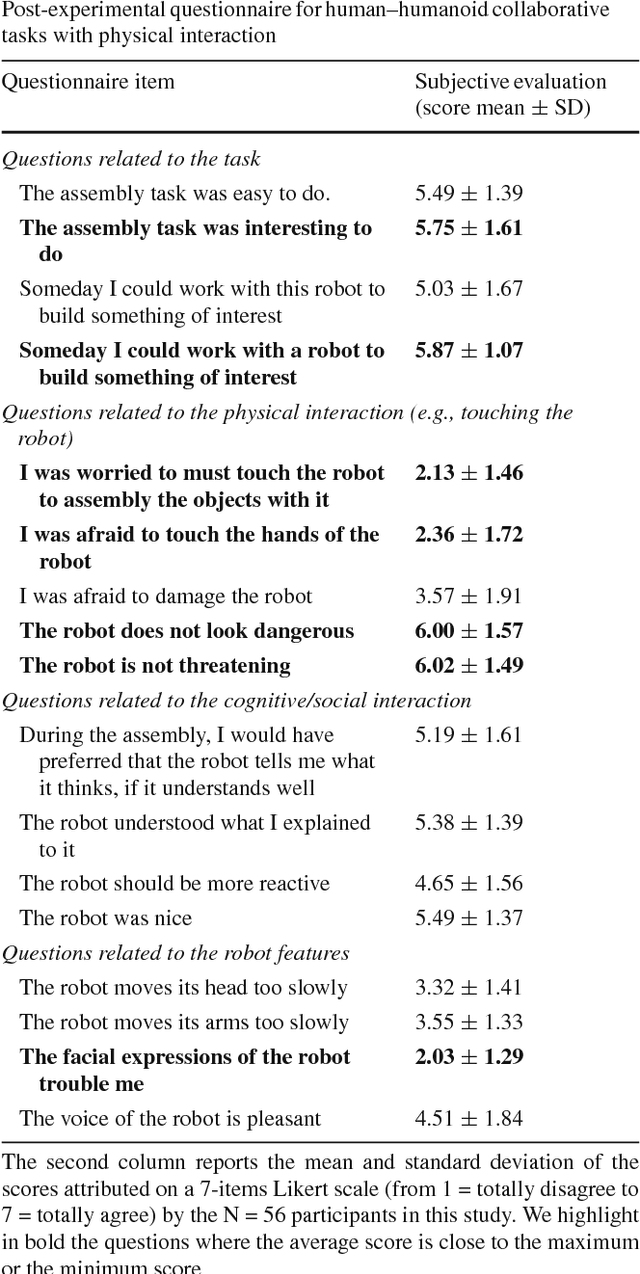
To investigate the functional and social acceptance of a humanoid robot, we carried out an experimental study with 56 adult participants and the iCub robot. Trust in the robot has been considered as a main indicator of acceptance in decision-making tasks characterized by perceptual uncertainty (e.g., evaluating the weight of two objects) and socio-cognitive uncertainty (e.g., evaluating which is the most suitable item in a specific context), and measured by the participants' conformation to the iCub's answers to specific questions. In particular, we were interested in understanding whether specific (i) user-related features (i.e. desire for control), (ii) robot-related features (i.e., attitude towards social influence of robots), and (iii) context-related features (i.e., collaborative vs. competitive scenario), may influence their trust towards the iCub robot. We found that participants conformed more to the iCub's answers when their decisions were about functional issues than when they were about social issues. Moreover, the few participants conforming to the iCub's answers for social issues also conformed less for functional issues. Trust in the robot's functional savvy does not thus seem to be a pre-requisite for trust in its social savvy. Finally, desire for control, attitude towards social influence of robots and type of interaction scenario did not influence the trust in iCub. Results are discussed with relation to methodology of HRI research.
Towards engagement models that consider individual factors in HRI: on the relation of extroversion and negative attitude towards robots to gaze and speech during a human-robot assembly task
Aug 19, 2015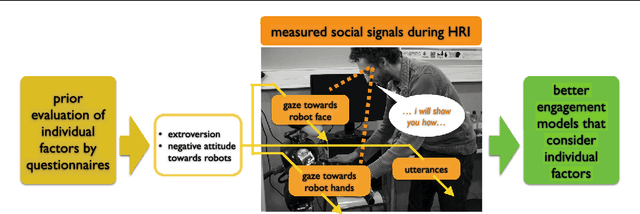
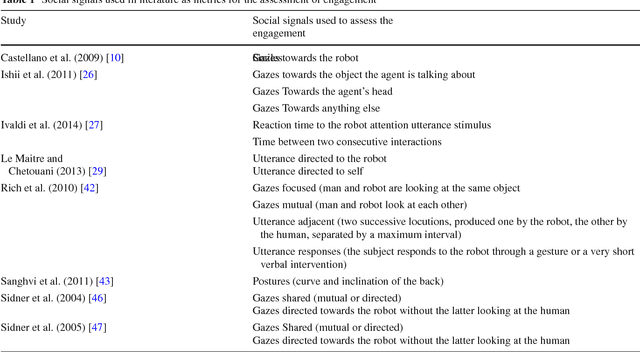
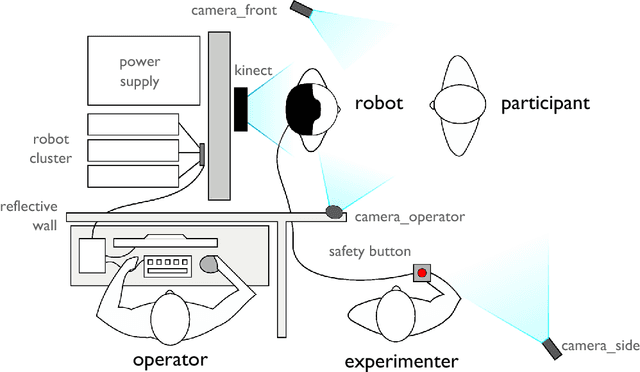
Estimating the engagement is critical for human - robot interaction. Engagement measures typically rely on the dynamics of the social signals exchanged by the partners, especially speech and gaze. However, the dynamics of these signals is likely to be influenced by individual and social factors, such as personality traits, as it is well documented that they critically influence how two humans interact with each other. Here, we assess the influence of two factors, namely extroversion and negative attitude toward robots, on speech and gaze during a cooperative task, where a human must physically manipulate a robot to assemble an object. We evaluate if the scores of extroversion and negative attitude towards robots co-variate with the duration and frequency of gaze and speech cues. The experiments were carried out with the humanoid robot iCub and N=56 adult participants. We found that the more people are extrovert, the more and longer they tend to talk with the robot; and the more people have a negative attitude towards robots, the less they will look at the robot face and the more they will look at the robot hands where the assembly and the contacts occur. Our results confirm and provide evidence that the engagement models classically used in human-robot interaction should take into account attitudes and personality traits.